






30
2025
-
10
南京大学:降耗100倍!,研发非接触感知颠覆机器人触觉,识别准确率超90%
浏览:255
发布:2025-10-30 21:00:58
【导语】自然界中,生物为生存演化出多样非接触式感知能力,其中蜘蛛凭借独特感知策略实现高效节能感知。近日,南京大学研究团队受蜘蛛启发,提出柔性脉冲毛发感受器(FISH),其结构独特、能耗极低,结合脉冲神经网络构建的非接触触觉(jué)感(gǎn)知(zhī)系(xì)统(tǒng),多(duō)维(wéi)识(shi)别(bié)准(zhǔn)确(què)率(lǜ)超(chāo)92%,集成(chéng)于(yú)蜘(zhī)蛛(zhū)机(jī)器(qì)人(rén)后(hòu)能(néng)有(yǒu)效(xiào)扩(kuò)展(zhǎn)其(qí)环(huán)境(jìng)感(gǎn)知(zhī)能(néng)力(lì)。
在(zài)自(zì)然(rán)界(jiè)中(zhōng),生物体(tǐ)为了生存,演化出了各式各样的感知能力。其中,非接触式感知——即无需直接触碰便能探测环境变化和潜在威胁的能力,在许多动物的生存策略中扮演着关键角色。
在众多非接触式感知方式中,人类最为依靠的视觉拥有最高的分辨率,却也伴随着最高的能耗,消耗了大脑超过40%的感(gǎn)知(zhī)处理能量。与视觉系统相比,蜘蛛选择了一条不同的演化路径。它们的光感受器密度比哺乳动物低20倍,但全身却覆盖着极高密度的毛状感受器,每平方毫米可达400根。这些毛状感受器能够将外界非接触刺激(如猎物引起的气流)转换为神经脉冲序列,每次事件消耗的能量低于100pJ,能量密度比视觉系统低数百倍。这种策略实现了广域感官覆盖,同时将能耗降至最低,并克服了视觉感知的诸多限制。此类高效而节能的感知方式,正为现代机器人技术与人工智能感知系统带来深远启示。
近日,南京大学研究团队受此启发,提出了一种柔性脉冲毛发感受器(FISH),仿照蜘蛛毛感受器,能够将气流信号实时转化为电脉冲,从而实现非接触式感知。其功率密度低于100 nW/cm2,每个感知事件的能耗约为660 pJ,与蜘蛛毛感受器几乎相当,比传统非接触传感器的能耗低了两个数量级。
▍柔性脉冲毛发感受器(FISH)的结构特点
那么,这一超低功耗的传感器是如何实现的呢?研究团队的核心设计在于其独特的结构。这款(kuǎn)名为(wèi)柔(róu)性(xìng)脉(mài)冲(chōng)毛(máo)发(fā)感(gǎn)受(shòu)器(qì)(FISH)”新(xīn)型(xíng)传(chuán)感(gǎn)器(qì),是(shì)由(yóu)基(jī)于(yú)聚(jù)酰(xiān)亚(yà)胺(àn)(PI)的(de)毛(máo)发(fā)状(zhuàng)传(chuán)感(gǎn)器(qì)和(hé)基(jī)于(yú)Ag/PI/LIG/PI 的(de)柔(róu)性(xìng) TS忆(yì)阻(zǔ)器(qì)组(zǔ)成(chéng),能(néng)够(gòu)将(jiāng)气(qì)流(liú)信(xìn)息(xi)转(zhuǎn)换(huàn)为(wèi)用(yòng)于非接触感知的(de)脉(mài)冲序列。
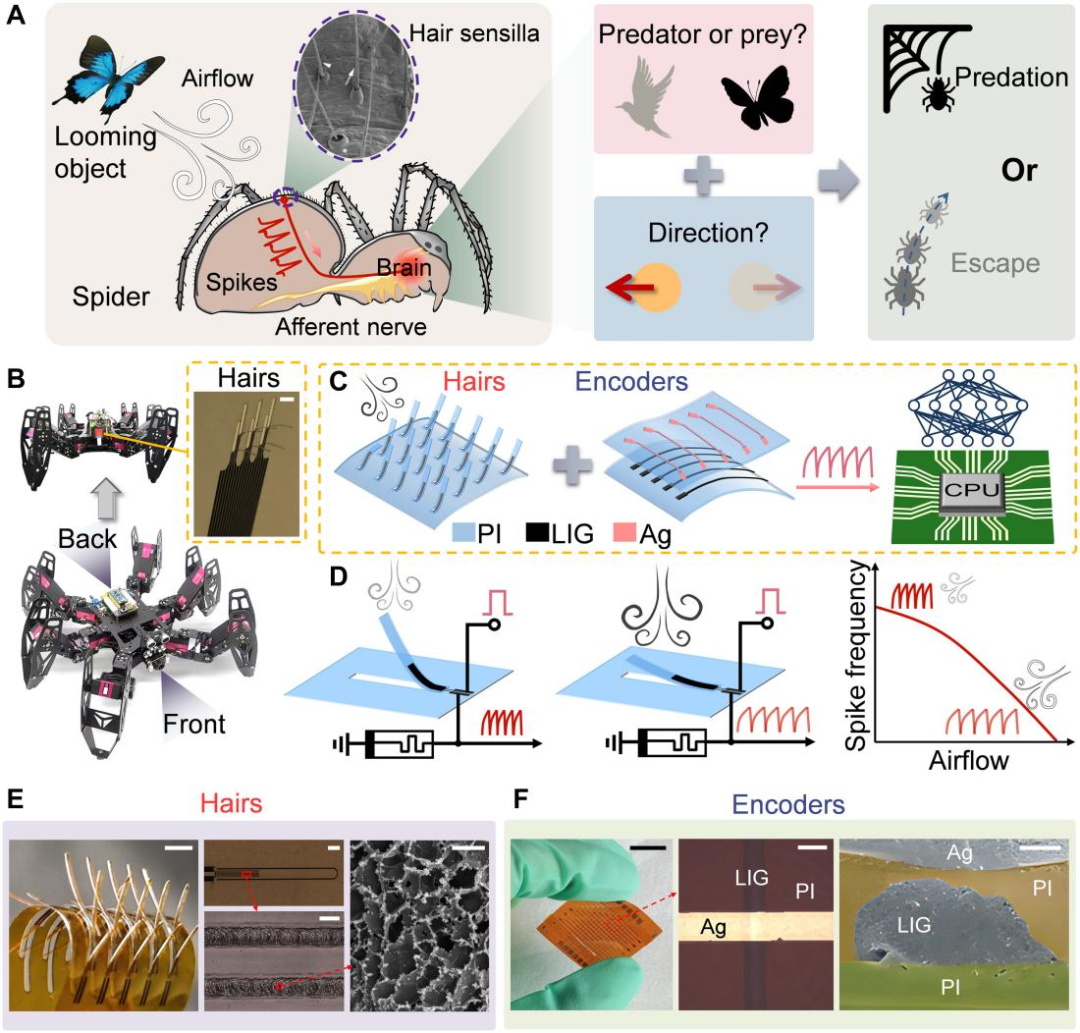
FISH的(de)概(gài)念(niàn)设(shè)计(jì)和(hé)结(jié)构(gòu)特(tè)征(zhēng)
毛(máo)发(fā)状(zhuàng)传(chuán)感(gǎn)器(qì):仿(fǎng)生(shēng)设(shè)计(jì)的(de)精(jīng)髓(suǐ)
FISH的(de)毛(máo)发(fā)状(zhuàng)传(chuán)感(gǎn)器(qì)采用(yòng)激(jī)光(guāng)诱(yòu)导(dǎo)石(shí)墨(mò)烯(xī)(LIG)技(jì)术(shù),在(zài)聚(jù)酰(xiān)亚(yà)胺(àn)基(jī)底(dǐ)上(shàng)制(zhì)作(zuò)出(chū)宽(kuān)度(dù)仅(jǐn)约(yuē)25微(wēi)米(mǐ)的(de)传(chuán)感(gǎn)元件。扫描电子显微镜显示,LIG呈现泡沫状多孔结构,这种结构不仅增强了传感器的响应灵敏度,还保证了良好的柔韧性。
该传感器能够检测低至0.4米/秒的气流速度,通过调整PI基底厚度,甚至可实现0.04米/秒的最低检测限。在7.0米/秒的气流速度下,传感器的响应和恢复时间分别仅为约40毫秒和26毫秒。经过4500次循环测试,传感器仍保持稳定性能,显示出优异的可靠性。
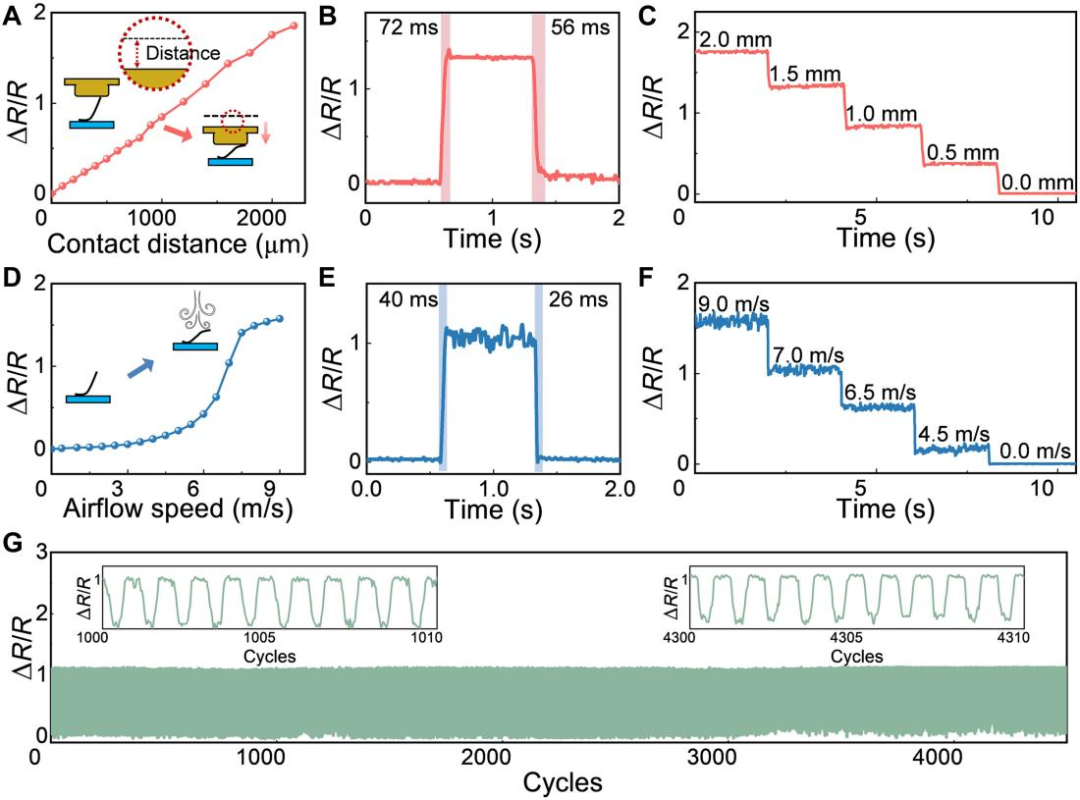
毛发状传感器的电气特性
柔性TS忆阻器:脉冲编码(mǎ)的(de)核(hé)心(xīn)
柔(róu)性(xìng)TS忆(yì)阻(zǔ)器(qì)是(shì)FISH实(shí)现(xiàn)脉(mài)冲(chōng)编(biān)码(mǎ)的(de)关键。它(tā)展(zhǎn)现(xiàn)出(chū)典(diǎn)型(xíng)的(de)突(tū)触(chù)行(xíng)为(wèi):当(dāng)施(shī)加(jiā)的(de)电(diàn)压(yā)超(chāo)过(guò)阈(yù)值(zhí)时(shí),器(qì)件(jiàn)从(cóng)高(gāo)阻(zǔ)状(zhuàng)态(tài)切(qiè)换(huàn)到(dào)低(dī)阻(zǔ)状(zhuàng)态(tài);当电压低于保持电压时,又自发返回高阻状态。这种特性使得忆阻器能够在电流偏置下产生自激振荡,输出频率可调的电压尖峰。
该忆阻器表现出卓越的稳定性:经过1000次重复循环,高阻态和低阻态的变异系数分别仅为7.71%和10.71%;在不同弯曲半径(3-20毫米)和温度(dù)条(tiáo)件(jiàn)(40-200°C)下(xià)均(jūn)保持稳定工作。当输入电流从100皮安增加到200纳安时,尖峰频率可从155赫兹提升至2650赫兹。
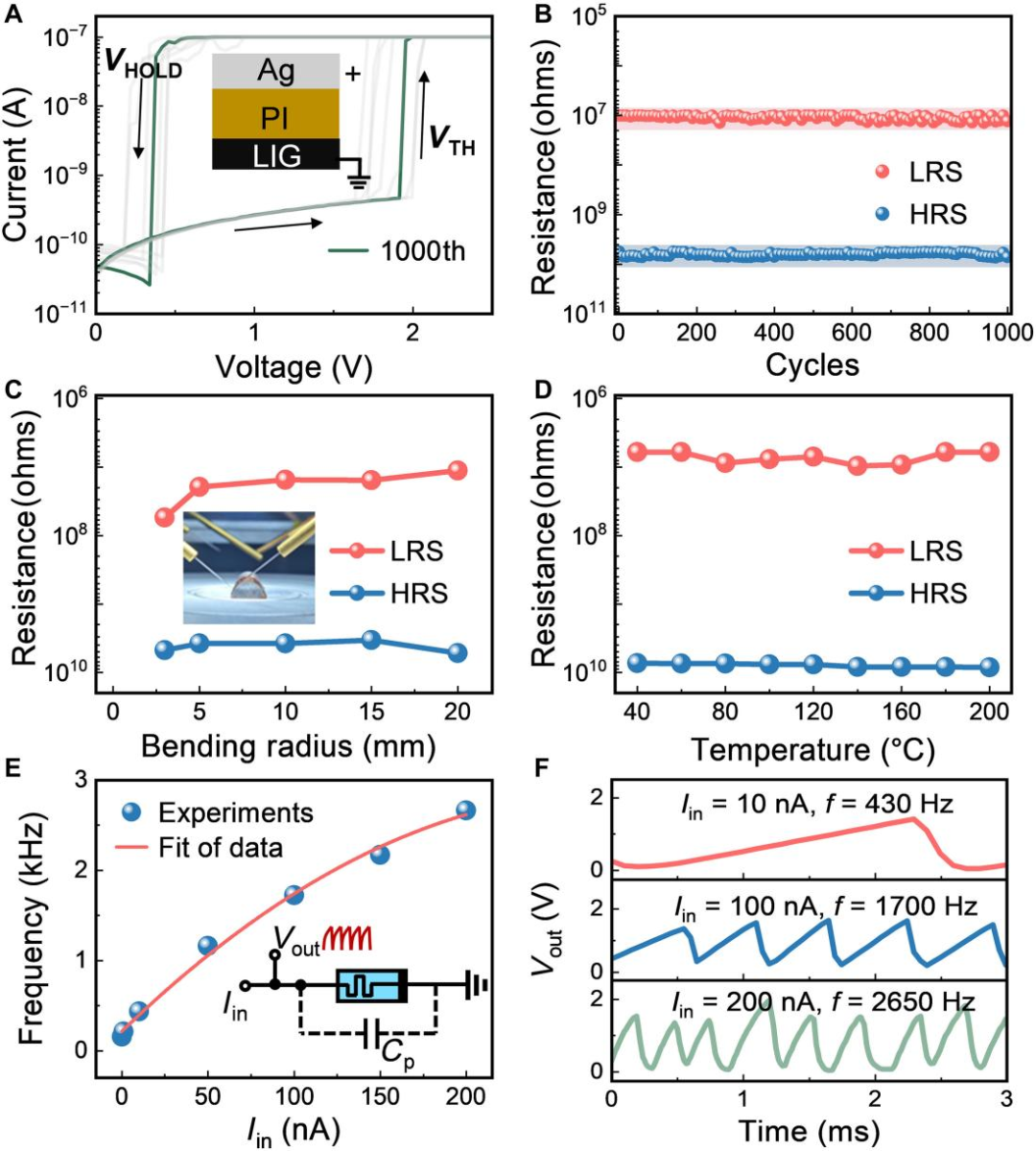
柔性TS忆阻器的电气特性
协同工作:从气流到脉冲序列
当FISH检测到气流或接触刺激时,毛发状传感器的电阻发生变化,从而改变流过TS忆阻器的电流。这一变化触发忆阻器的自激振荡特性,将传感信息编码为频率可调的脉冲序列。在2.4伏偏置电压下,FISH产生的尖峰频率约为500至1500赫兹,功耗仅约600纳瓦,每次事件的能量消耗约为660 pJ,非常接近蜘蛛机械感受器的能耗水平。
最重要的是,FISH的功率密度低于100纳瓦/平方毫米,比已报道的非接触式传感设备至少低100倍,为实现大规模传感器阵列提供了可能。
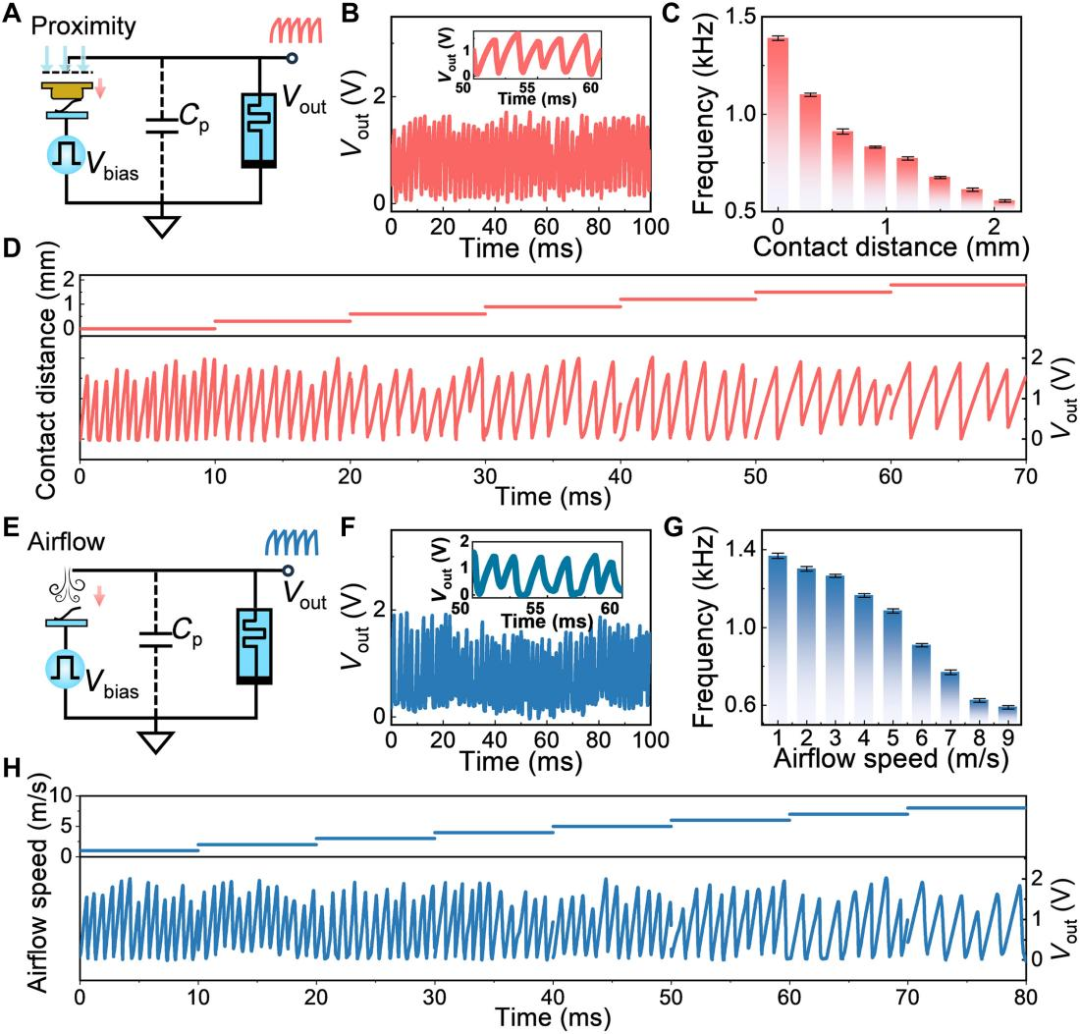
FISH 的刺突编码行为
▍基于FISH矩阵和脉冲神经网络,构建完整非接触触觉感知系统
研究团队进一步结合FISH矩阵与脉冲神经网络(SNN),构建了一套完整的非接触触觉感知(NCTP)系统,这一系统模仿生物感觉处理中的两种关键机制:群体编码和感受野整合。
群体编码:单根FISH 仅能感知 “有气流”,但 25 根 FISH 协同工作,就能捕捉气流的 “空间分布”—— 比如蝴蝶形状的气流模板,会让不同位置的 FISH 产生不同频率的脉冲,共同构成蝴蝶的脉冲图像。

基于NCTP系统实现气流介导的非接触式识别
感受野整合:每根FISH 负责一个 “小区域” 的感知,SNN 会把这些小区域的信号整合起来,分析出目标的 “类型”(比如是蝴蝶还是飞蛾)和 “方向”(从左边来还是右边来)。
研究团队构建了一个包含10个标签的自定义数据集,代表五种不同的模式类型和两种方向条件。经过70个训练周期后,脉冲神经网络对这些非接触目标的多维识别准确率超过92%。这表明,通过FISH矩阵的群体编码,系统能够有效提取关于气流模式和方向的多维信息。
▍NCTP 增强型蜘蛛机器人的集成与场景验证
为验证NCTP系统的实际性能,研究团队将2×3 FISH矩阵集成到蜘蛛机器人中。机器人的前端配备商用数码相机用于视觉感知,后端则安装FISH矩阵用于非接触触觉感知。
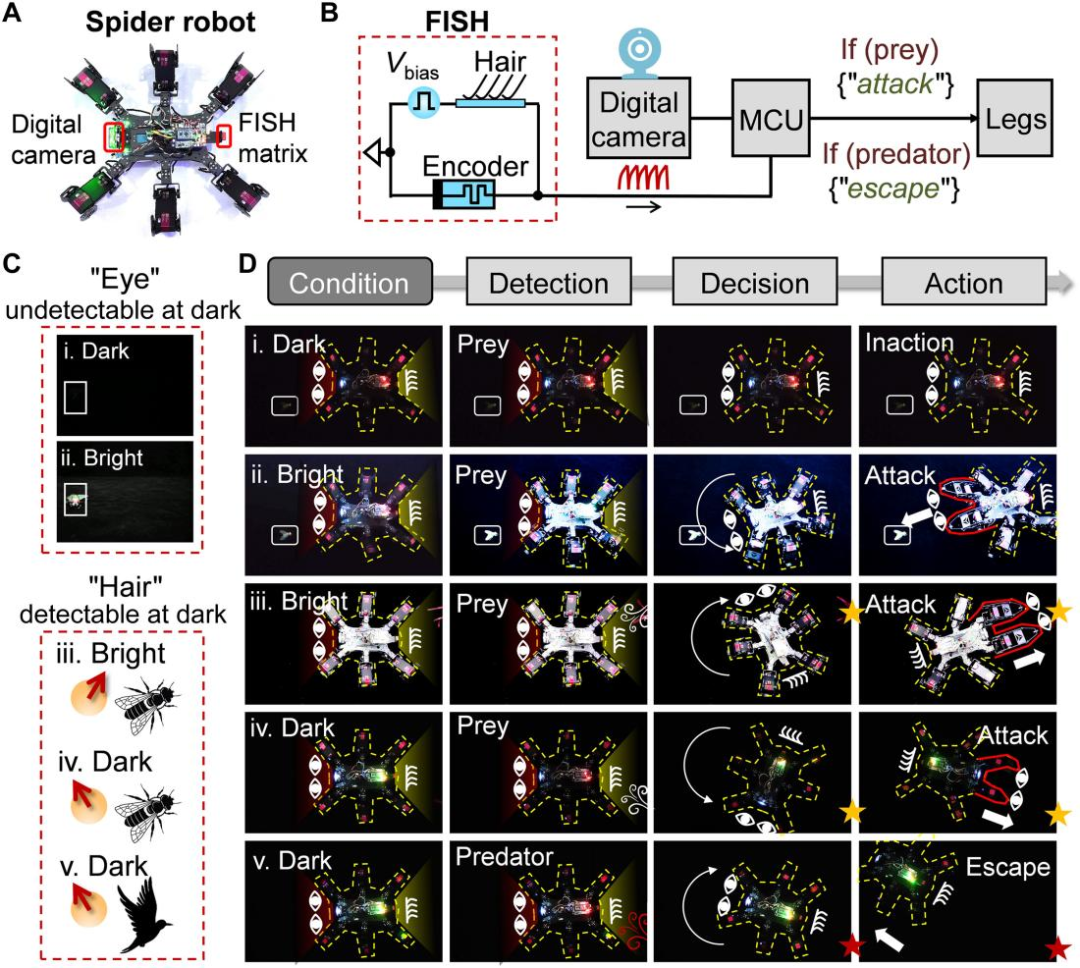
NCTP增强型蜘蛛机器人的演示
在五个不同的实验场景中,蜘蛛机器人展示了对视觉和非接触触觉刺激的智能响应:
在黑暗环境中,视觉系统失效,机器人保持静止;在光照条件下,视觉系统检测到前方猎物,机器人发起攻击;无论光照条件如何,当气流表明猎物位于机器人后方时,FISH矩阵触发机器人转身并攻击;当检测到后方捕食者气流模式时,机器人迅速向安全方向逃跑。
这些实验证明,NCTP系统能够有效扩展机器人的环境感知能力,克服视觉感知在黑暗、低能见度或盲区条件下的限制。
来源:ACs期刊资讯
相关新闻







联系我们
地址:山东省济南市槐荫区兴福街道齐鲁大道3189号西进时代中心
电话:15898523365
传真:15898523365
邮箱:service@Kaiyun.cco
网址:http://www.rjptj.com

