






08
2025
-
11
ADI如何构建具身智能的物理基石
浏览:246
发布:2025-11-08 12:00:58
【导语】具身智能正处从实验室迈向产业规模化应用的关键节点,人形机器人市场预计高速增长,背后是行业对智能机器人执行复杂任务的需求激增。在此浪潮中,ADI 推出多项关键技术,ADMT4000 单芯片多圈位置传感器攻克断电位置感知难题,TMC9660 芯片实现复杂算法高效集成(chéng),还有针对性通信连接方案构建高效通信架构,为具身智能产业化提供坚实支撑,引领智能机器人时代。
具身智能,这一承载着将AI赋予物理实体的宏大愿景,正站在从实验室突破走向产业规模化应用的关键路口。根据Markets and Markets报告,人形机器人市场预计将从2024年的20.3亿美元增长到2029年的132.5亿美元,复合年增长率(CAGR)高达45.5%。2025年,全球人形机器人市场规模预计将突破85亿美元,这一惊人的增长预测背后,是(shì)行业对能够执行复杂任务的智能机器人日益增长的需求。
在这一产业浪潮中,解决核心物理挑战的关键技术正不断涌现,并获得业界的高度认可。近日,ADI的两款核心器件便斩获殊荣,其中TMC9660高集成硬件智能伺服电机驱动控制芯片荣获“年度优秀电机控制技术产品奖”,而ADMT4000—单芯片角度和多圈编码器位置传感器则摘得“年度优秀AI机器人创新产品奖”。这两个奖项不仅是对产品创新的肯定,更精准地指向了具身智能从实验室迈向商业化应用所必须攻克的技术难点。


目前,运动控制、环境感知、多体协作、芯片小型化及功耗续航等,是具身智能落地过程中环环相扣的难题。要知道,顶尖的AI算法必须运行在同样卓越的物理硬件基础之上,而感知、控制与连接,正是构建这一基础的核心关键。
彻底摆脱“断电失忆”
机器人运动控制的精确性与可靠性,始于对每一个关节当前绝对位置的精确感知。尤其是在意外断电重启后(hòu),快(kuài)速(sù)恢(huī)复(fù)位(wèi)置(zhì)信(xìn)息(xi)的(de)能(néng)力(lì),是(shì)衡(héng)量(liàng)其(qí)性(xìng)能(néng)的(de)核(hé)心(xīn)指(zhǐ)标(biāo)。
在(zài)这(zhè)方(fāng)面(miàn),传(chuán)统(tǒng)方(fāng)案(àn)各(gè)有(yǒu)瓶(píng)颈(jǐng),其(qí)中(zhōng)“齿(chǐ)轮(lún)组(zǔ)+单(dān)圈(quān)编(biān)码(mǎ)器(qì)”的(de)机械式方案,存在机械磨损与背隙,长期运行影响精度,且结构笨重,与人形机器人追求的轻量化相悖;“备用电池+存储器”的电子方案则引入了电池寿命、维护更换等问题,增加了系统的复杂性和长期拥有成本;而基于韦根(Wiegand)效应的方案在某些工况下,尤其是在圈数累积较多或转速变化剧烈时,存在发生圈数计数错误的风险(即“丢圈”现象),这对于要求高可靠性的机器人应用是不可接受的。
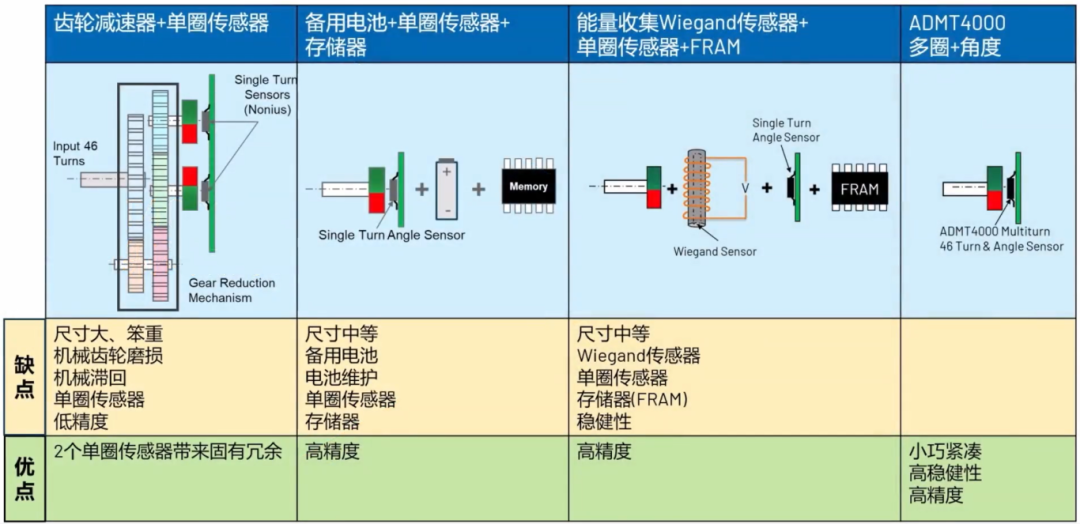
为从根本上克服这些挑战,ADI推出了ADMT4000单芯片多圈位置传感器。其核心技术突破在于利用磁畴壁在磁性纳米导线中的可控传播,实现了完全无源(无供电)状态下的多圈位置信息记录。这意味着,即使在系统完全断电期间关节发生了运动,ADMT4000内部的物理状态也会随之改变并被保留。当系统重新上电时,只需一次简单的读取,即可立即获知横跨46圈测量范(fàn)围(wéi)的(de)绝(jué)对(duì)位(wèi)置(zhì),精(jīng)度(dù)高(gāo)达(dá)±0.25度(dù)。这(zhè)种(zhǒng)上(shàng)电(diàn)立(lì)即(jí)知(zhī)位(wèi)的(de)特(tè)性(xìng),彻(chè)底(dǐ)省(shěng)去(qù)了(le)繁(fán)琐(suǒ)的(de)归(guī)零(líng)校(xiào)准(zhǔn),极(jí)大(dà)提(tí)升(shēng)了(le)机(jī)器(qì)人(rén)的(de)作(zuò)业(yè)效(xiào)率(lǜ)和(hé)系统的鲁棒性(xìng)。
除(chú)了(le)在(zài)人(rén)形(xíng)机(jī)器(qì)人(rén)关节(jié)中(zhōng)的(de)核(hé)心(xīn)应(yīng)用(yòng),ADMT4000凭(píng)借(jiè)其(qí)无(wú)源(yuán)、多(duō)圈(quān)、高(gāo)可(kě)靠(kào)性(xìng)的(de)特(tè)点(diǎn),在(zài)工(gōng)业(yè)协(xié)作(zuò)机(jī)器(qì)人(rén)、起(qǐ)重(zhòng)机(jī)拉(lā)线式编码器,乃至汽车安全带卷收器和线控转向系统等对安全性和可靠性要求极高的场景中,也展现出巨大的应用潜力。
从复杂算法到高效集成的硬件化运动控制
拥有了精确的感知,如何将其转化为平顺、高效的物理动作,是运动控制的核心。磁场定向控制(FOC)因其出色的转矩控制和平稳运行特性,已成为高性能伺服系统的技术标准。但其复杂的算法实现和参数调试过程,对开发团队构成了巨大的软件工程负担,往往耗费大量研发资源,并延长了产品上市周期。
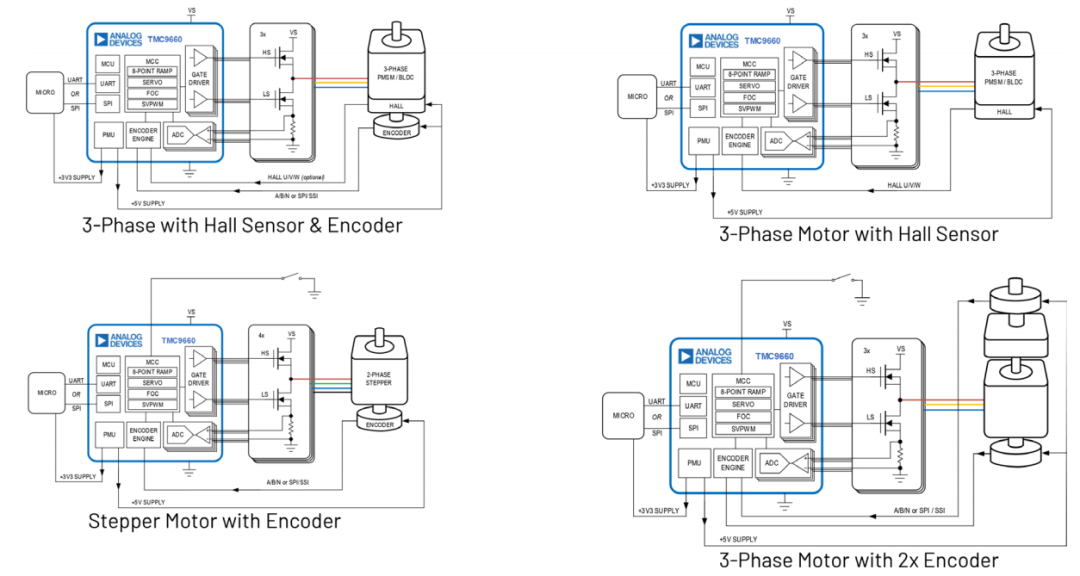
TMC9660子系统图
对此,ADI高集成单片伺服驱控芯片TMC9660将工程师从这种复杂性中解放出来,同时也有效解决了机器人设计中空间、效率与控制精度之间的矛盾。这款芯片内部集成了MCU、70V/2A智能栅极驱动器(GDRV)、LDOs及Buck转换器,开发者仅需外置功率MOSFET即可构成完整的伺服驱动单元。这种高度集成的设计,极大地简化了关节驱动的硬件电路,为机器人灵巧手等狭小空间内的多自由度控制提供了可能。
更重要的是,通过将控制算法硬件化,TMC9660支持高达100kHz的伺服环路控制及8点Ramp轨迹发生器,确保了机器人动作的高效、精准与平顺,让开发者能从繁琐的底层驱动开发中解放出来,更专注于上层应用与智能化算法的创新。
构建高效的机器人通信架构
具身智能机器人是一个复杂的分布式系统,其“大脑”需要实时处理来自全身各处的海量数据,并向“四肢”下达协同指令。这就要求其内部通信网络必须具备高带宽、低延迟和高可靠性,同时还要应对布线复杂的挑战。ADI为此提供了一套针对性的通信连接解决方案。
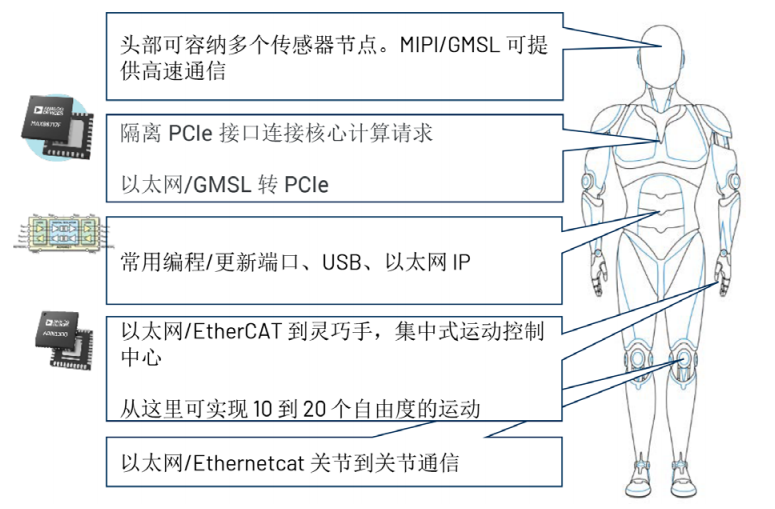
在数据处理的核心层,作为一款具有低延迟特性的低功耗、单端口、千兆以太网收发器,ADIN1300提供了高速数据交换的主干道,并确保了机器人从感知到行动的(de)实(shí)时(shí)性(xìng)的(de)关键以(yǐ)及(jí)续(xù)航(háng)力(lì)能(néng)。并(bìng)且(qiě)ADIN1300集成(chéng)了(le)高(gāo)能(néng)效(xiào)以(yǐ)太(tài)网(wǎng)(EEE)物(wù)理(lǐ)层(céng)器(qì)件(jiàn)(PHY)内(nèi)核(hé)以(yǐ)及(jí)相(xiāng)关的(de)通(tōng)用(yòng)模(mó)拟(nǐ)电(diàn)路、输(shū)入(rù)和(hé)输(shū)出(chū)时(shí)钟(zhōng)缓(huǎn)冲(chōng)、管(guǎn)理(lǐ)接(jiē)口(kǒu)和(hé)子(zi)系(xì)统(tǒng)寄(jì)存(cún)器(qì)以(yǐ)及(jí)MAC接(jiē)口(kǒu)和(hé)控(kòng)制(zhì)逻(luó)辑(ji),以(yǐ)便(biàn)管(guǎn)理(lǐ)复(fù)位(wèi)和(hé)时(shí)钟(zhōng)控(kòng)制(zhì)以(yǐ)及(jí)引(yǐn)脚(jiǎo)配(pèi)置(zhì)。

而对于摄(shè)像(xiàng)头(tóu)、激(jī)光(guāng)雷(léi)达(dá)等(děng)高(gāo)带(dài)宽(kuān)的(de)感(gǎn)知(zhī)数(shù)据(jù)接(jiē)入(rù),ADI的(de)GMSL技(jì)术(shù)提(tí)供(gōng)了(le)极(jí)为(wèi)高(gāo)效(xiào)的(de)方(fāng)案(àn)。以(yǐ)MAX96717与(yǔ)MAX96724为(wèi)例(lì),它(tā)们(men)能(néng)通(tōng)过(guò)单(dān)根(gēn)轻(qīng)便(biàn)的(de)同(tóng)轴(zhóu)电(diàn)缆(lǎn)或(huò)屏(píng)蔽(bì)双(shuāng)绞(jiǎo)线(xiàn),长(zhǎng)距(jù)离(lí)传(chuán)输(shū)实(shí)时(shí)、未(wèi)压(yā)缩(suō)的(de)视(shì)频(pín)与(yǔ)传(chuán)感(gǎn)器(qì)数(shù)据(jù),并(bìng)同(tóng)时(shí)承(chéng)载(zài)控(kòng)制(zhì)信(xìn)号(hào)与(yǔ)远(yuǎn)端(duān)供(gōng)电(diàn)。这(zhè)项(xiàng)技(jì)术(shù)极(jí)大(dà)地(de)简(jiǎn)化(huà)了(le)机(jī)器(qì)人(rén)复(fù)杂(zá)传(chuán)感(gǎn)器(qì)系(xì)统(tǒng)的(de)布(bù)线(xiàn),有(yǒu)效(xiào)减(jiǎn)轻(qīng)了(le)机(jī)械(xiè)臂(bì)等(děng)运(yùn)动(dòng)部(bù)件(jiàn)的(de)重(zhòng)量(liàng)和(hé)惯(guàn)量(liàng)。
而(ér)在(zài)连(lián)接(jiē)遍(biàn)布(bù)全身(shēn)的(de)传(chuán)感(gǎn)器(qì)与(yǔ)执(zhí)行(xíng)器(qì)时(shí),SPE技(jì)术(shù)则(zé)展(zhǎn)现(xiàn)出(chū)其(qí)独(dú)特(tè)的(de)优(yōu)势(shì)。ADI提(tí)供(gōng)了(le)多(duō)种(zhǒng)SPE产(chǎn)品(pǐn)组(zǔ)合(hé),例(lì)如(rú)基(jī)于(yú)10BASE-T1L标(biāo)准(zhǔn)的(de)ADIN1100 PHY、ADIN1110 MAC-PHY及(jí)ADIN2111双(shuāng)端(duān)口(kǒu)交(jiāo)换(huàn)机(jī),支(zhī)持(chí)在(zài)单(dān)根(gēn)双(shuāng)绞(jiǎo)线(xiàn)上(shàng)实(shí)现(xiàn)长(zhǎng)距(jù)离(lí)连(lián)接(jiē)和(hé)菊(jú)花(huā)链(liàn)式(shì)组(zǔ)网(wǎng),有(yǒu)效(xiào)减(jiǎn)少(shǎo)了(le)机(jī)器(qì)人(rén)臂(bì)内(nèi)的(de)线(xiàn)束(shù)数(shù)量(liàng);而(ér)基(jī)于(yú)10BASE-T1S标(biāo)准(zhǔn)的(de)AD330x系(xì)列(liè)产(chǎn)品(pǐn),则(zé)支(zhī)持(chí)在(zài)短(duǎn)距(jù)离(lí)总(zǒng)线(xiàn)上(shàng)挂(guà)载(zài)多(duō)个(gè)设(shè)备(bèi),进(jìn)一(yī)步(bù)简(jiǎn)化(huà)高(gāo)密(mì)度(dù)节(jié)点的连接拓扑。
从实验室到产业应用的,具身智能发展离不开底层硬件技术的托举。ADI正通过一系列高性能解决方案直面产业核心痛点,将宏大的具身智能构想,落实为产业化道路上坚实可靠的每一步,与全球合作伙伴共同迎接一个更智能、更高效的机器人时代。
相关新闻







联系我们
地址:山东省济南市槐荫区兴福街道齐鲁大道3189号西进时代中心
电话:15898523365
传真:15898523365
邮箱:service@Kaiyun.cco
网址:http://www.rjptj.com

