






06
2025
-
12
宏集应用 | 人形机器人时代来临,不可或缺的核心部件竟然是它?
浏览:219
发布:2025-12-06 06:30:10
【导语】2025年人形机器人行业迈入“量产落地关键年”,技术突破与场景拓展双(shuāng)轮(lún)驱(qū)动(dòng):鹿(lù)明(míng)、小(xiǎo)鹏(péng)等(děng)企(qǐ)业(yè)新(xīn)品(pǐn)频(pín)出(chū),优(yōu)必(bì)选(xuǎn)、立(lì)讯(xùn)精(jīng)密(mì)等(děng)订(dìng)单(dān)与(yǔ)出(chū)货(huò)量(liàng)大(dà)增(zēng),AI与(yǔ)国(guó)产(chǎn)部(bù)件(jiàn)推(tuī)动(dòng)应(yīng)用(yòng)向(xiàng)教(jiào)育(yù)、文旅(lǚ)、家(jiā)庭(tíng)等(děng)多(duō)领(lǐng)域延(yán)伸。在此背景下,仿生手等关键部件对小型线性伺服执行器需求凸显,宏集IR Robot 12Lf凭借小体积、大推力、高精度等优势,为人形机器人及工业、医疗等多场景提供可靠动力支持,加速行业从(cóng)概(gài)念(niàn)走(zǒu)向(xiàng)现(xiàn)实。
人形机器人蓝海蓄势待发
2025年人形机器人行业进入“量产落地关键年”,技术突破与场景落地双线提速。11月世界智能制造大会上,鹿明机器人LUS2以“一秒弹射起身”刷新行业恢复速度纪录;小鹏IRON机器人因流畅“猫步”仿生表现引发热议,成为消费级赛道焦点。
当前国内超150家人形机器人企业竞逐市场,优必选全年订单超13亿元,立讯精密年内计划出货3000台。AI大模型与国产关节部件的突破,推动机器人从工业装配向教育、文旅等场景延伸,松延动力“小布米”以9998元售价打开家庭消费市场。
人形机器人行业大事件梳理
01
2023年5月:特斯拉擎天柱Gen-2实现单腿站立与精细操作,AI交互能力迈过实用门槛。
02
2024年6月:优必选Walker S1首入汽车工厂,承担极氪(kè)车(chē)型(xíng)质检任务,开启工业规模化应(yīng)用(yòng)。
03
2025年(nián)8月(yuè),世(shì)界(jiè)机(jī)器(qì)人(rén)大(dà)会(huì)上(shàng)演(yǎn)“机(jī)器(qì)人(rén)格(gé)斗(dòu)”“精(jīng)准(zhǔn)铺(pù)床(chuáng)”等(děng)实(shí)景(jǐng)演(yǎn)示(shì),新(xīn)品(pǐn)集中(zhōng)发(fā)布(bù)。
04
2025年(nián)11月(yuè):特(tè)斯(sī)拉(lā)弗(fú)里(lǐ)蒙(méng)特(tè)工(gōng)厂(chǎng)试(shì)产(chǎn)擎(qíng)天(tiān)柱(zhù),官宣2026年1000万台年产能目标
05
2025年12月:智元远征A2完成百公里跨省行走,年内实现千台级量产交付。
二
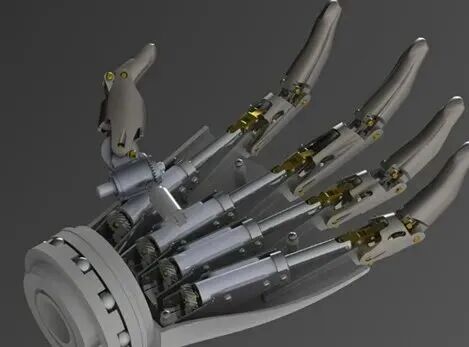
仿生手的关键动力来源
从远景来看,人形机器人产品业务的场景需求还是非常大的,核心代替的是现在与人相关的业务需求。因此,该行业需要AI技术、机器人技术、机电技术的加持,去充分发挥仿人机器人跨领域、多任务、多场景的适应能力。可以说,当下人形机器人行业面临的技术挑战,并不在于机器人技术本身,更多在于整个工业的水平及其整合与创新。
人形机器人三大基本要素
01
传感器:本体感受传感器、触觉+视觉+声音传感器、机器视觉等
02
执行器:减速器、伺服系统、微电机等
03
计划控制:控制器、工控系统、AI系统等
上述技术共同打造了人形机器人卓越的移动能力和工作范围。在移动能力方面,不仅仅考虑工作范围的大小,还包括仿生手的关节结构、能触达的区域大小和灵活的交互。而小型线性伺服执行器则是实现仿生手灵活性的关键动力来源。
小(xiǎo)型(xíng)线(xiàn)性(xìng)伺(cì)服(fú)执(zhí)行(xíng)器(qì)是(shì)一(yī)种(zhǒng)小(xiǎo)型(xíng)化(huà)的(de)线(xiàn)性(xìng)运(yùn)动(dòng)装(zhuāng)置(zhì),它(tā)结(jié)合(hé)了(le)传(chuán)统(tǒng)的(de)线(xiàn)性(xìng)执(zhí)行(xíng)器(qì)和(hé)伺(cì)服(fú)驱(qū)动(dòng)技(jì)术(shù),能(néng)够(gòu)对(duì)执(zhí)行(xíng)器(qì)的(de)位(wèi)置、速度和力量进行精确控制,在体积小的同时能够保持精度高且快速响应和调节,功耗相对于伺服电机+谐波减速机的方案大大降低,性能上也是小型步进推杆所不能实现的。
宏集12Lf小型线性伺服执行器
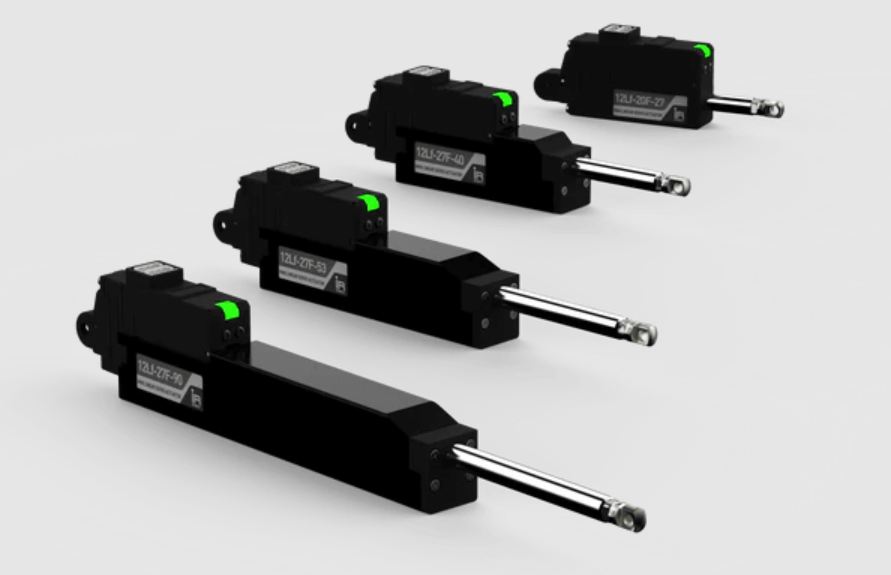
宏集IR Robot 12Lf小型线性伺服执行器,设备尺寸最小仅50*36*18mm,重量也仅有100g左右,但却能够提供100N的推力,在降低使用频率的情况下,推力甚至能够达到200N。其失速力基本为所能提供推力的5-6倍,即此款设备在受力超过600N时电缸才会无法保持原定速度和工作状态。

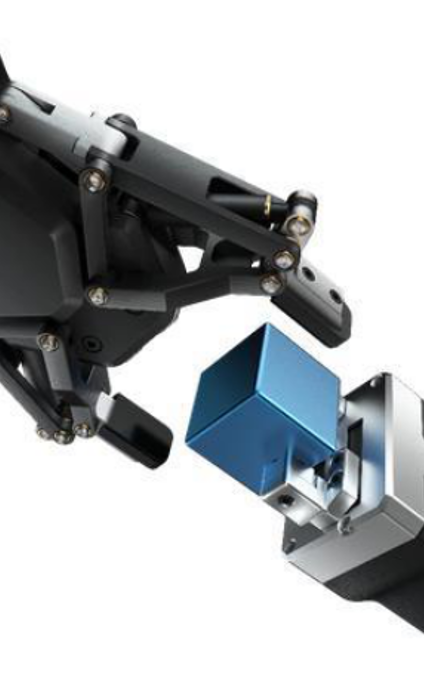
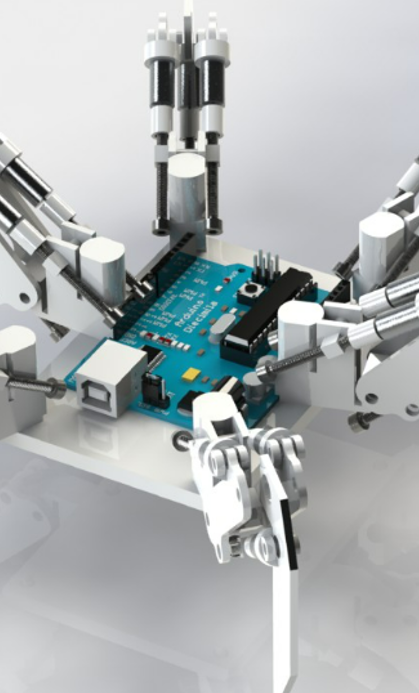
在人形机器人的使用上,宏集12Lf小型线性伺服执行器能够为仿生机械手提供强大的动力来源,实现抓握力度和速度的精准控制。
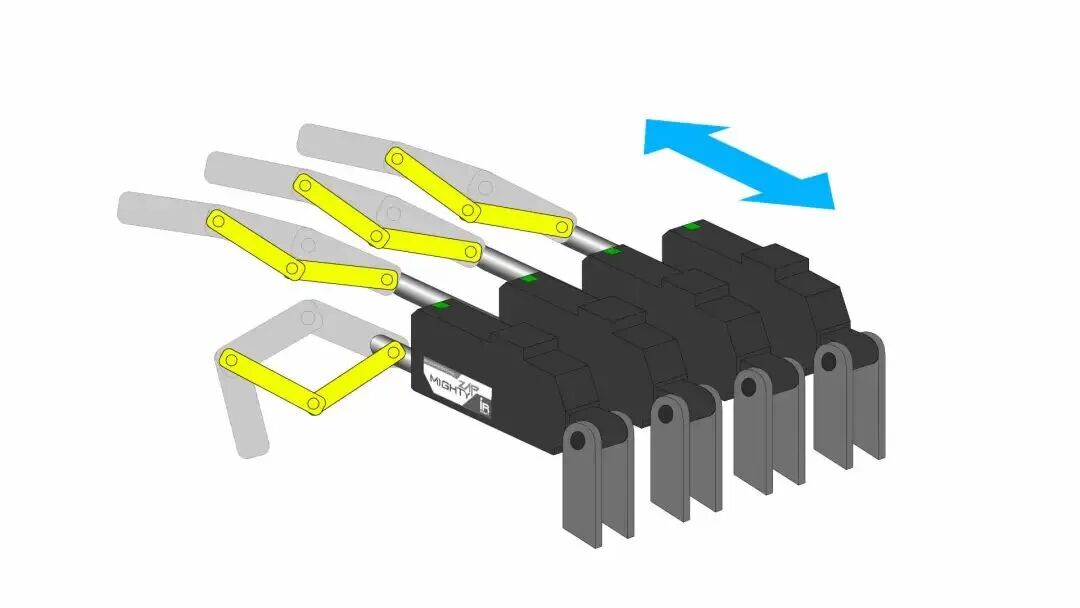
除了人形机器人的仿真夹爪,机器人夹具、攀爬机器人、蜘蛛机器人关节也同样可以由12Lf小型线性伺服执行器提供动力。
三
宏(hóng)集12Lf伺(cì)服(fú)执(zhí)行(xíng)器(qì)其(qí)他(tā)应(yīng)用(yòng)场(chǎng)景(jǐng)
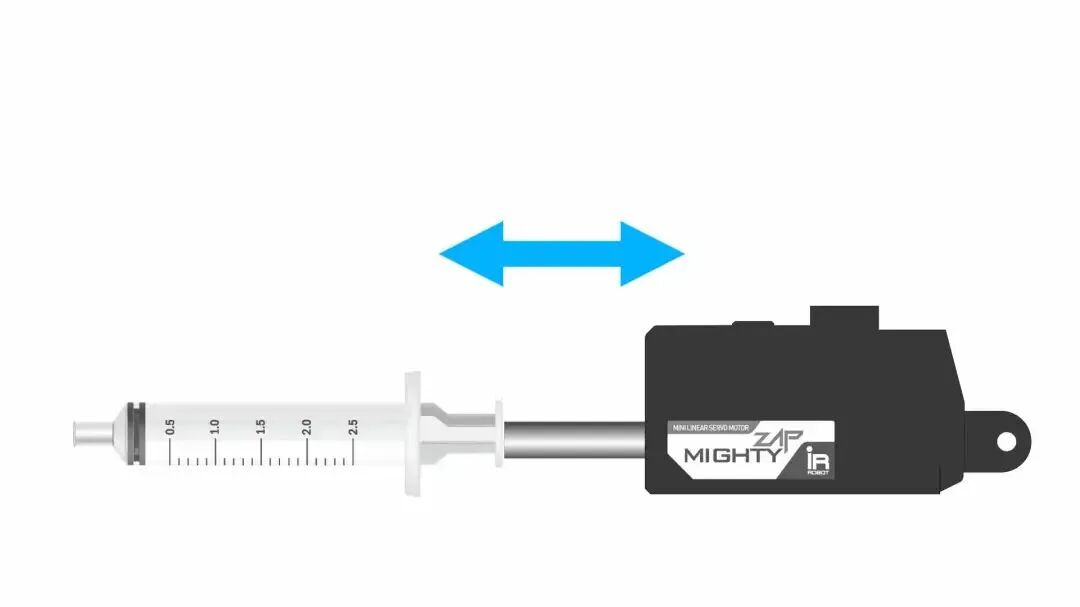
除了在机器人关节领域的应用,宏集12Lf小型线性伺服执行器能够通过电位器进行绝对位置感知且无需复位,达到30-50μm的重复定位精度,适用于医疗领域的电子注射、移液设备等。
宏集12Lf小型线性伺服执行器有多种行程可选,最高可达90mm,速度最快可达110mm/s,拥有32Bit微控制器、4096高分辨率A/D转换器,1024步动态速度控制,同时带有Z轴自锁功能,在实现精度、速度、耐用度的前提下保障使(shǐ)用(yòng)安(ān)全性。在工业领域,12Lf也可用于阀门控制、锁定夹紧、调整加工件位置/角度、深度/厚度检测等场景。
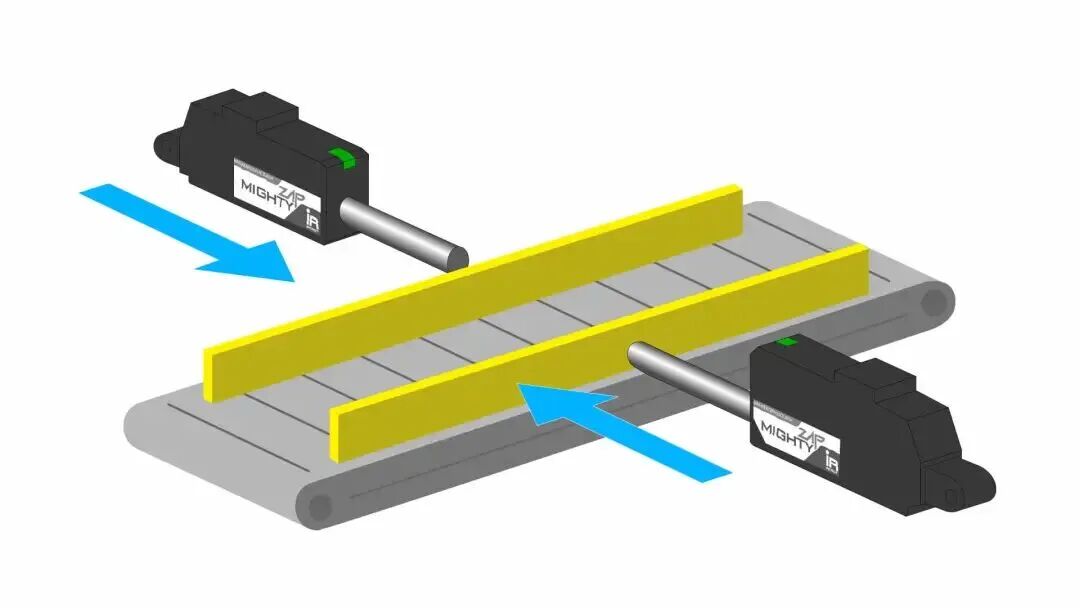
此外,12Lf小型线性伺服执行器还具备丰富的可选配件和安装方案,能够根据您的具体应用场景进行组合,具有高度的灵活性和适应性。
结语
在多方入局下,人形机器人正从概念逐渐变为现实,从技术突破逐渐走向量产落地。而在仿人关节结构,尤其是仿生手的制造过程中,小型线性伺服执行器是不可或缺的动力来源。宏集12Lf小型线性伺服执行器具有体积小、推力大、精度高的特点,能够实现抓握力度和速度的控制,为人形机器人的实现提供了可靠的动力支持,也可广泛应用在工业、医疗、实验等领域。
相关新闻







联系我们
地址:山东省济南市槐荫区兴福街道齐鲁大道3189号西进时代中心
电话:15898523365
传真:15898523365
邮箱:service@Kaiyun.cco
网址:http://www.rjptj.com

