






27
2025
-
02
惯性测量单元传感器在自主移动机器人的应用
浏览:497
发布:2025-02-27 12:12:26
利用IMU增强机器人
定位与实现精确导航
惯性测量单元(IMU)传感器可实现机器人的定位与导航,已(yǐ)成(chéng)为(wèi)机(jī)器(qì)人(rén)精(jīng)确(què)定位的重要组成部分。IMU集成了加速度计、陀螺仪和磁力计,通过提供实时响应,使机器人能够准确地确定其方向、位置和运动,从而使机器人能够在动态变化的环境中导航。本文将为您介绍IMU的功能特性,与在自主移动机器人(AMR)的应用,以及ADI所提供的相关解决方案。
IMU帮助在AMR运行环境中实现精确定位
IMU可提供关键的运动数据,已成为机器人精确定位的重要组成部分。传感器融合技术可将IMU数据与其他传感器(例如摄像头或LIDAR)相结合,通过整(zhěng)合(hé)多(duō)个(gè)数(shù)据(jù)源(yuán)来(lái)提(tí)高(gāo)定(dìng)位(wèi)精(jīng)度(dù)。IMU广(guǎng)泛(fàn)应(yīng)用(yòng)于(yú)移(yí)动(dòng)机器人、人形机器人、无人机(UAV),以及虚拟/增强现实。它们在实现精确定位方面发挥了重要作用,使机器人能够(gòu)自(zì)主执(zhí)行(xíng)复(fù)杂(zá)任务并与周围环境有效互动。
AMR对于未来的智能工厂和仓储至关重要,在塑造未来自动化、可持续和清洁的工厂方面发挥着关键作用。AMR可提高效率、减少浪费并优化工业环境中的利用率。虽然未来可能会专门为AMR建造和优化工厂环境,但让这些机器人适应现有的仓库和工厂仍面临诸多挑战。AMR面临的主要障碍涉及两个关键部分,包括如何高效路径规划(确定最佳路径)和精确定位(不断更新其在环境中的位置)。
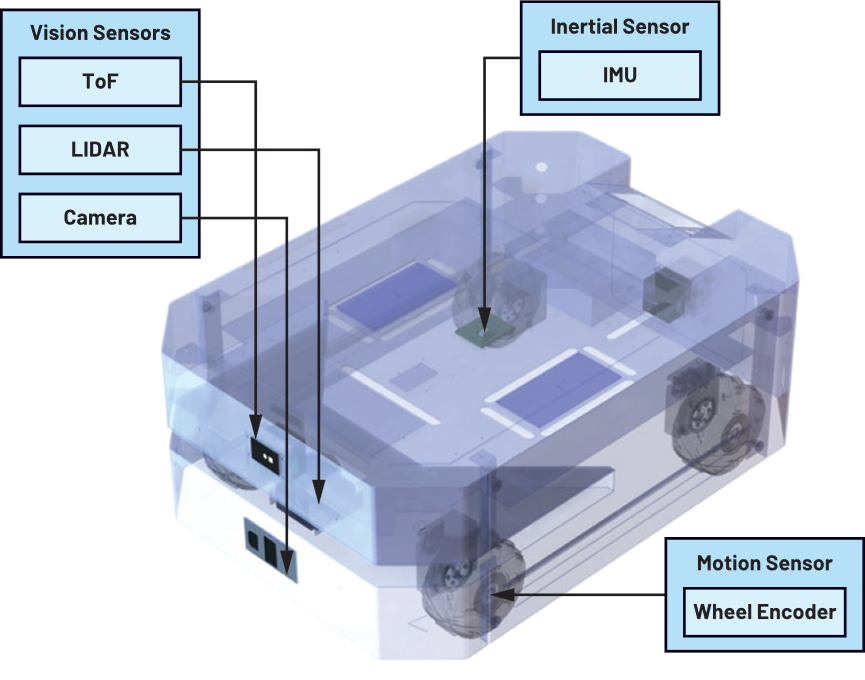
由于GPS无法在覆盖的封闭环境下进行室内导航,因此AMR需要利用一系列传感器和算法进行定位和导航。其中包括摄像头、LIDAR和雷达等视觉传感器,以及车轮编码器和IMU等测程传感器。每种传感器模式在范围、准确性和传感信息方面都各有优势。这些传感器的组合可确保提供全面的数据,从而在动态环境中有效定位机器人。
高性能IMU提升AMR的定位与导航能力
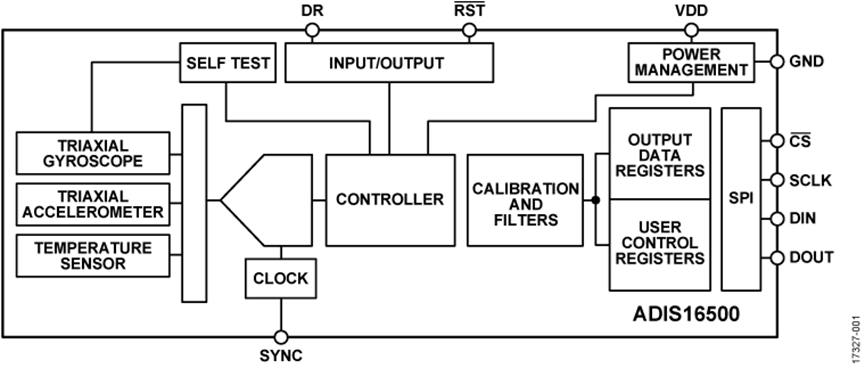
IMU是由微机电系统(MEMS)器件构成的微型器件。其中通常包括三轴加速度计、三轴陀螺仪、高性能磁力计等。三轴加速度计用于测量相对于地球重力场的加速度。三轴陀螺仪用于测量旋转速率,提供三个轴上每个轴的角速度。高性能磁力计可提供磁场测量,对于在(zài)具(jù)有(yǒu)挑(tiāo)战(zhàn)性的环境中准确估计方向至关重要。此外,还有其它种IMU,如温度传感器用于补偿温度变化,气压计用于测量压力。
IMU的高刷新速率的实时定位,是自主性和实时导航是机器人操作环境中的关键要素(sù)。然(rán)而(ér),感(gǎn)知(zhī)传(chuán)感(gǎn)器(qì)的(de)刷(shuā)新(xīn)速(sù)率(lǜ)通(tōng)常(cháng)受(shòu)到(dào)限(xiàn)制(zhì),大(dà)概(gài)在(zài)10 Hz到30 Hz的范围内。相比之下,IMU拥有提供高保真位置输出的能力,最高可达200 Hz。更高的刷新速率,显着提高了系统在动态环境中,快速适应方向快速变化时的可靠性,从而有助于快速响应。凭借加速的刷新速率,AMR还能够在其他测量之间的短暂间隔内提供估计姿态。因此,IMU在实现实时定位方面发挥着关键作用,其刷新速率比感知传感器快10倍。
另一方面,IMU是航位推算的支柱,航位推算是一种根据先前已知的位置估计当前位置的导航技术。IMU可随着时间推移不断提供位置、方向和速度数据,从而实现精确估计,有助于AMR实现可靠导航。
此外,IMU具有紧凑的尺寸和轻便的设计,非常适合集成到各种移动机器人配置中。IMU并需要具备(bèi)在(zài)不(bù)同(tóng)环(huán)境(jìng)中(zhōng)的(de)可(kě)靠(kào)性(xìng),具(jù)有(yǒu)一(yī)定(dìng)的(de)抗(kàng)电(diàn)磁(cí)干(gàn)扰(rǎo)能(néng)力(lì),可(kě)以(yǐ)在(zài)多(duō)种(zhǒng)环(huán)境(jìng)中(zhōng)运(yùn)行(xíng),包(bāo)括(kuò)室(shì)外(wài)和(hé)室(shì)内(nèi)环(huán)境(jìng)。因(yīn)此(cǐ),它(tā)们(men)适(shì)合(hé)广(guǎng)泛(fàn)的(de)应(yīng)用(yòng)。
IMU还(hái)可(kě)以通过加快刷新速率提高可靠性,感知传感器的刷(shuā)新(xīn)速(sù)率(lǜ)通(tōng)常(cháng)限(xiàn)制(zhì)在(zài)约(yuē)10 Hz至(zhì)30 Hz之(zhī)间(jiān),而(ér)IMU可(kě)提(tí)供(gōng)高(gāo)达(dá)4 kHz原(yuán)始(shǐ)数(shù)据(jù)的(de)高(gāo)保(bǎo)真(zhēn)位(wèi)置(zhì)输(shū)出(chū),具(jù)有(yǒu)显(xiǎn)着(zhe)的(de)优(yōu)势(shì)。更(gèng)高(gāo)的(de)刷(shuā)新(xīn)速(sù)率(lǜ)增(zēng)强(qiáng)了(le)可(kě)靠(kào)性(xìng),特(tè)别(bié)是(shì)在(zài)动(dòng)态(tài)环(huán)境(jìng)中(zhōng),使(shǐ)AMR能(néng)够(gòu)快(kuài)速(sù)响(xiǎng)应(yīng),并(bìng)有(yǒu)助(zhù)于(yú)在(zài)其(qí)他(tā)测(cè)量(liàng)之(zhī)间(jiān)的(de)短(duǎn)期(qī)间隔内估计姿态。
在已经有视觉传感器的情况下,IMU对AMR来说仍然必不可少,这是因为AMR通常具有多种视觉传感器,例如飞行时间(ToF)、摄像(xiàng)头(tóu)、LIDAR等(děng)。尽(jǐn)管视觉测程提供了丰富的数据集,但IMU仍有存在的必要性。
例如,AMR可在特征稀疏的走廊中导航,同步定位与地图绘制(SLAM)算法本质上通过匹配观察到的传感器数据来工作,这些数据存储在地图中以便在地图内进行定位。IMU还可实现在广阔的开放环境中导航,当在大型开放空间(如50 m×50 m的大型仓库)中工作时,因为各个独特特征超出了传感器范围(LIDAR的最大范围通常约为10 m到15 m),AMR的测程功能无法发挥作用。
当在斜坡上行驶时,传统的SLAM算法依靠LIDAR时会遇到挑战,因为2D点数据不显示坡度信息。IMU可通过提取坡度信息来帮助解决这一难题,从而有效地在斜坡上导航。利用IMU导航时,需要具备对环境因素的敏感性,LIDAR传感器对各种环境因素很敏感,例如环境光、灰尘、雾和雨。这些因素会降低传感器数据的质量,进而影响SLAM算法的性能。IMU可以在各种环境中可靠运行,因而成为移动机器人在发挥多功能性时的合适选择。
传感器融合可提高IMU的可靠性与数据质量
然而,世界上并没有十全十美的传感器,尽管IMU有其优势,但也存在风险并会带来一些挑战,像是IMU测量容易受到噪声的影响,这会降低机器人导航和控制的准确性。为了补偿噪声,IMU通常采用先进的滤波技术,例如卡尔曼滤波或FIR。
另一方面,IMU传感器会随着时间的推移积累偏置,这会导致方向和运动估计出现误差。为了解决这个问题,采用了偏置估计算法来(lái)不(bù)断(duàn)更(gèng)新(xīn)IMU传感器读数。此外,IMU传感器会表现出非线性行为,这会进一步加剧数据处理和解释的复杂性。为了对非线性度进行补偿,需要(yào)对(duì)其(qí)进(jìn)行(xíng)校(xiào)准(zhǔn)以(yǐ)表征传感器的行为并应用适当的校正。
随机游走现象也是需要考虑的议题,IMU易受到外部热机械事件的影响,导致ARW(角度随机游走(陀螺仪中))和VRW(速度随机游走(加速度计中))出现误差。该如何降低这些风险呢?传感器融合(hé)将(jiāng)是(shì)重(zhòng)要(yào)的(de)技(jì)术(shù)!
传(chuán)感(gǎn)器(qì)融(róng)合(hé)可(kě)提(tí)高(gāo)可(kě)靠(kào)性(xìng)、提(tí)高(gāo)数(shù)据(jù)质(zhì)量(liàng),以及更好地估计未测量的状态,并增加覆盖范围从而确保安全。传感器融合需要靠算法来支持,扩展卡尔曼滤波等状态估计技术可以纠正常规AMR运行期间的噪声、ARW和偏置不稳定性误差,并通过测量地球引力加速度,可以消除IMU中的俯仰和滚转陀螺仪误差,该算法会跟踪和纠正偏置漂移,并纠正ARW误差。
扩展卡尔曼滤波器(EKF)则可用在即使建模系统的确切性质未知,也支持对过去、现在和未来状态的估计。随着时间的推移,观察到的测量值包含高斯白噪声或其他不准确性,并通过同步传感器之间的测量、预测姿态和误差估计、估计和更新预测值的不确定性,利用这些方式来估计测量的真实值。
高精密度的微型微机电系统惯性测量单元
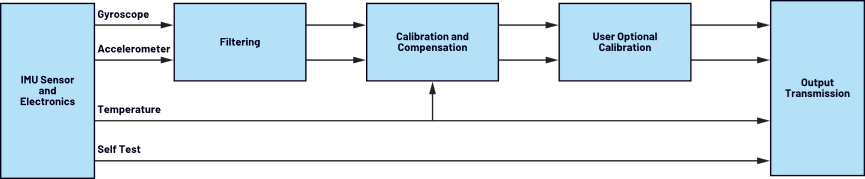
由ADI推出的ADIS16500是一款精密的微型微机电系统惯性测量单元,它包括一个三轴陀螺仪和一个三轴加速度计。ADIS16500中的每个惯性传感器均结合了可优化动态性能的信号调节功能。工厂校准可表现(xiàn)每(měi)个(gè)传(chuán)感(gǎn)器(qì)的(de)灵(líng)敏(mǐn)度(dù)、偏(piān)置(zhì)、对(duì)准(zhǔn)、线(xiàn)性(xìng)加(jiā)速(sù)(陀(tuó)螺(luó)仪(yí)偏(piān)置(zhì))和(hé)冲(chōng)击(jī)点(diǎn)(加(jiā)速(sù)度(dù)计(jì)位(wèi)置(zhì))。因(yīn)此(cǐ),每(měi)个(gè)传(chuán)感(gǎn)器(qì)都(dōu)有(yǒu)动(dòng)态(tài)补偿公式,用于在各种条件下提供准确的传感器测量。
ADIS16500提供了一种简化且经济高效的方法,用于将精确的多轴惯性检测技术集成到工业系统中,尤其是在与离散设计所涉及的复杂性和投资进行比较时。所有必要的运动检测和校准均已在工厂生产过程中完成,大大缩短了系统集成时间。在导航系统中,紧密的正交对准简化了惯性坐标系对准。串行外设接口(SPI)和寄存器结构设有一个简单接口,用于数据收集和配置控制。
ADIS16500内置的三轴数字陀螺仪具有±2000°/sec的动态范围,运行偏置稳定性为8.1°/小时,x轴和y轴角度随机游走为0.29°/√小时,1 σ,轴间错位误差为±0.25°;内置三轴数字加速(sù)计(jì)的(de)动(dòng)态(tài)范(fàn)围(wéi)为(wèi)±392 m/s2,运(yùn)行(xíng)偏(piān)置(zhì)稳(wěn)定(dìng)性(xìng)为(wèi)125 μm/s2,支(zhī)持(chí)三(sān)轴(zhóu)、角(jiǎo)度(dù)增(zēng)量(liàng)和(hé)速(sù)度(dù)增(zēng)量(liàng)输(shū)出(chū),出(chū)厂(chǎng)前(qián)经(jīng)过(guò)工(gōng)厂(chǎng)校(xiào)准(zhǔn)灵(líng)敏度、偏置和轴向对准(zhǔn),校准温度范围为−10℃至+75℃。
ADIS16500支(zhī)持(chí)SPI兼容数据通信,以及(jí)可(kě)编程操作和控制、自动和手动偏置校正控制,还(hái)有(yǒu)用于同步数据采集的数据就绪指示器,支持直接、缩放和输出的外部同步模式,以及惯性传感器按需自检、闪存按需自检,采用3.0 V至3.6 V单电源供(gōng)电(diàn)(VDD),具(jù)有(yǒu)19,600 m/sec2机械冲击生存能力,可在−25℃至+85℃的温度范围工作,ADIS16500采用100球的球栅阵列(BGA)封装,尺寸约为15 mm × 15 mm × 5 mm。ADIS16500可应用于导航、稳定和仪器仪表、无人和自动驾驶车辆、智能农业和建筑机械、工厂/工业自动化、机器人、虚拟/增强现实、运动物联网(IoMT)等。
结语
IMU是(shì)AMR定(dìng)位(wèi)的(de)必(bì)备(bèi)元(yuán)器(qì)件(jiàn),因(yīn)为(wèi)IMU可(kě)以(yǐ)提(tí)供(gōng)方(fāng)向(xiàng)估(gū)计(jì)和(hé)运(yùn)动(dòng)跟(gēn)踪(zōng),并(bìng)以(yǐ)高(gāo)刷(shuā)新(xīn)速(sù)率(lǜ)提(tí)供(gōng)实(shí)时(shí)响(xiǎng)应(yīng),使(shǐ)得(de)AMR能(néng)够(gòu)在(zài)动(dòng)态(tài)环(huán)境(jìng)中(zhōng)行(xíng)驶(shǐ)。借(jiè)助(zhù)卡(kǎ)尔(ěr)曼(màn)滤(lǜ)波(bō)器(qì)等(děng)传(chuán)感(gǎn)器(qì)融(róng)合(hé)技(jì)术(shù),可(kě)以(yǐ)组(zǔ)合(hé)其(qí)他(tā)传(chuán)感(gǎn)器(qì)模(mó)块(kuài)来(lái)弥(mí)补(bǔ)彼(bǐ)此(cǐ)的(de)局(jú)限(xiàn)性(xìng)。ADI提(tí)供(gōng)丰(fēng)富(fù)多(duō)样(yàng)的(de)IMU,将(jiāng)可(kě)满(mǎn)足(zú)各(gè)种(zhǒng)移(yí)动(dòng)机(jī)器(qì)人(rén)应(yīng)用(yòng)的(de)特(tè)定(dìng)要(yào)求(qiú)。
相关新闻







联系我们
地址:山东省济南市槐荫区兴福街道齐鲁大道3189号西进时代中心
电话:15898523365
传真:15898523365
邮箱:service@Kaiyun.cco
网址:http://www.rjptj.com

