






06
2025
-
03
中科本原推出面向人形机器人的关节电机解决方案
浏览:492
发布:2025-03-06 18:00:17
在人工智能与高端制造的浪潮中,人形机器人正从科幻想象加速迈向现实。从特斯拉Optimus的工厂分拣到优必选Walker的养老陪护,人形机器人凭借类人形态与智能交互能力,正在工业、医疗、家庭服务等领域掀起革命。而这一变革的核心驱动力,正藏匿于机器人的“运动心脏”——关节电机。
人形机器人新浪潮:开启智慧新时代
高盛研究部指出,全球人形机器人产业正加速迈向全方位生态系统的成熟。在基本情景假设下,迅速增长的市场需求预计到2035年将释放高达380亿美元的潜在市场空间。此外,鉴于人形机器人仍处于早期发展阶段,并存多种技术路径,高盛预测行业竞争格局将持续演进,不断推动技术创新与产业升级。
工信部印发《人形机器人创新发展指导意见》,明确指出,人形机器人有望成为继计算机、智能手机、新能源汽车后的颠覆性产品。到 2025 年,人形机器人创新体系初步建立,“大脑、小脑、肢体”等一批关键技术取得突破,确保核心部组件安全有效供给。到 2027 年,人形机器人技术创新能力显著提升,形成安全可靠的产业链供应链体系,构建具有国际竞争力的产业生态,综合实力达到世界先进水平。
关节电机:赋予人形机器人生命之动
在人形机器人系统中,关节电机承担着至关重要的作用,是实现机器人灵活运动和高精度操控的核心驱动单元。作为“智能关节”,关节电机直接决定了机器人关节的运动性能、能效水平以及整体协作能力,其技术水平直接影响人形机器人的应用广度和发展前(qián)景(jǐng)。
宇(yǔ)树(shù)旗(qí)下(xià)的(de)G1通(tōng)用(yòng)人(rén)形(xíng)机(jī)器(qì)人(rén),可(kě)实(shí)现(xiàn)720度(dù)回(huí)旋(xuán)踢(tī)和(hé)多(duō)种(zhǒng)武(wǔ)打(dǎ)动(dòng)作(zuò)。G1机(jī)器(qì)人(rén)单(dān)腿(tuǐ)自(zì)由(yóu)度(dù)为(wèi)6,单(dān)手(shǒu)臂(bì)的(de)自(zì)由(yóu)度(dù)为(wèi)5,单(dān)手(shǒu)自(zì)由(yóu)度(dù)为(wèi)7,可(kě)选(xuǎn)手(shǒu)腕(wàn)自(zì)由(yóu)度(dù)为2,共用23-43个关节电机模组。
云深处旗下山猫全地形机器人在传承云深处在具身智能方面的技术积累的同时,基于"山猫"的形态针对性进行特色化适配,在特殊地形下表现优异,如楼梯、斜坡、石板路、碎石路穿越。山猫全地形机器人共用12个关节电机模组。
中科本原推出面向人形机器人的关节电机解决方案
BenYuan关节电机采用了一体化设计方式,包含了无框力矩电机、行星减速器、驱动器、编码器、铝合金传动件及外壳。电机整体重量为378g,尺寸为Ø80*40。
电机参数
BenYuan关节电机额定扭矩为5N·m,峰值扭矩为11N·m,提供了更强大的承载能力和更迅速的(de)动(dòng)态(tài)响(xiǎng)应(yīng)。额(é)定(dìng)转(zhuǎn)速(sù)120rpm与(yǔ)最(zuì)大(dà)转(zhuǎn)速(sù)420rpm提(tí)高(gāo)了(le)机(jī)器(qì)人(rén)运(yùn)动(dòng)的(de)灵(líng)活(huó)性(xìng)。此(cǐ)外(wài),板(bǎn)载(zài)编(biān)码(mǎ)器(qì)精(jīng)度(dù)达(dá)到(dào)了(le)16bit,提(tí)高(gāo)了(le)关节(jié)角(jiǎo)度(dù)控(kòng)制(zhì)的(de)精(jīng)准(zhǔn)度(dù)。更(gèng)多(duō)参(cān)数(shù)详(xiáng)情(qíng)见(jiàn)下(xià)表(biǎo)1。这(zhè)些(xiē)参(cān)数(shù)共(gòng)同(tóng)作(zuò)用(yòng),使(shǐ)关节(jié)电(diàn)机(jī)能(néng)够(gòu)满(mǎn)足(zú)不(bù)同(tóng)应(yīng)用(yòng)场(chǎng)景(jǐng)需(xū)求(qiú),为(wèi)人(rén)形(xíng)机(jī)器(qì)人(rén)提(tí)供(gōng)更(gèng)自(zì)然(rán)、更(gèng)高(gāo)效(xiào)的(de)运(yùn)动(dòng)能(néng)力(lì),助(zhù)力(lì)其(qí)在(zài)工(gōng)业(yè)、医(yī)疗(liáo)、服(fú)务(wu)等(děng)领(lǐng)域实(shí)现(xiàn)广(guǎng)泛(fàn)应(yīng)用(yòng)。
| 额(é)定(dìng)电(diàn)压(yā) | 24 VDC |
| 额(é)定(dìng)电(diàn)流(liú) | 10.5A |
| 额(é)定(dìng)转(zhuǎn)速(sù) | 120 rpm±10% |
| 额(é)定(dìng)扭(niǔ)矩(ju) | 5 N.m |
| 相(xiāng)间(jiān)电(diàn)阻(zǔ) | 0.48Ω±10% |
| 扭矩常数 | 0.47N.M/A |
| 重量 | 378g±3g |
| 减速比 | 8:1 |
| CAN通信波特率 | 1Mbps |
| 使用温度范围 | -20~50℃ |
| 使用湿度(dù)范(fàn)围(wéi) | 5~85%,无(wú)凝(níng)露(lù) |
表(biǎo)1 FDM关节电机参数详情
驱动板介绍
关节(jié)电(diàn)机(jī)驱(qū)动(dòng)板(bǎn)是(shì)连(lián)接(jiē)控(kòng)制(zhì)系(xì)统(tǒng)与(yǔ)电(diàn)机(jī)的(de)关键部(bù)件(jiàn),负(fù)责(zé)接(jiē)收(shōu)控(kòng)制(zhì)信(xìn)号(hào)、驱(qū)动(dòng)电(diàn)机(jī)运(yùn)转(zhuǎn),并(bìng)实(shí)现(xiàn)精(jīng)准(zhǔn)的(de)扭(niǔ)矩(ju)、速(sù)度(dù)和(hé)位(wèi)置(zhì)控(kòng)制(zhì)。作(zuò)为(wèi)人(rén)形(xíng)机(jī)器(qì)人(rén)关节(jié)电(diàn)机(jī)的(de)核(hé)心(xīn)驱(qū)动(dòng)模(mó)块(kuài),其(qí)性(xìng)能直接影响机器人的运动流畅度、响应速(sù)度(dù)和能耗效(xiào)率(lǜ)。
BenYuan关节(jié)电(diàn)机(jī)内(nèi)部(bù)集成(chéng)了(le)一(yī)款(kuǎn)自(zì)研(yán)的(de)关节(jié)电(diàn)机(jī)驱(qū)动(dòng)板(bǎn)。驱(qū)动(dòng)板(bǎn)以(yǐ)FDM320R035高(gāo)性(xìng)能(néng)数(shù)字(zì)信(xìn)号(hào)处(chù)理(lǐ)器(qì)为(wèi)核(hé)心(xīn),搭(dā)建(jiàn)了(le)一(yī)套(tào)高(gāo)效(xiào)电(diàn)机(jī)驱(qū)动(dòng)方(fāng)案(àn),能(néng)够(gòu)实现稳定的电机控制。该驱动板专为高精度伺服系统设计,具备强大的计算能力、精准的电流采样与驱动能力,为人形机器人等(děng)高(gāo)端(duān)应(yīng)用(yòng)提(tí)供(gōng)可(kě)靠(kào)的(de)动(dòng)力(lì)支(zhī)持(chí)。
核(hé)心(xīn)控(kòng)制(zhì)单(dān)元(yuán)采用(yòng)FDM320R035,具(jù)备(bèi)强(qiáng)大(dà)的(de)数(shù)据(jù)处(chù)理(lǐ)能(néng)力(lì),能(néng)够(gòu)高(gāo)速(sù)执(zhí)行(xíng)磁(cí)场(chǎng)定(dìng)向(xiàng)控(kòng)制(zhì)(FOC)算(suàn)法(fǎ),实(shí)现(xiàn)电(diàn)机(jī)的高精度扭矩、速度和位置控制。其高速运算能力确保机器人关节运动平稳流畅,提高动态响应速度和能效。整体控制框架见图5。
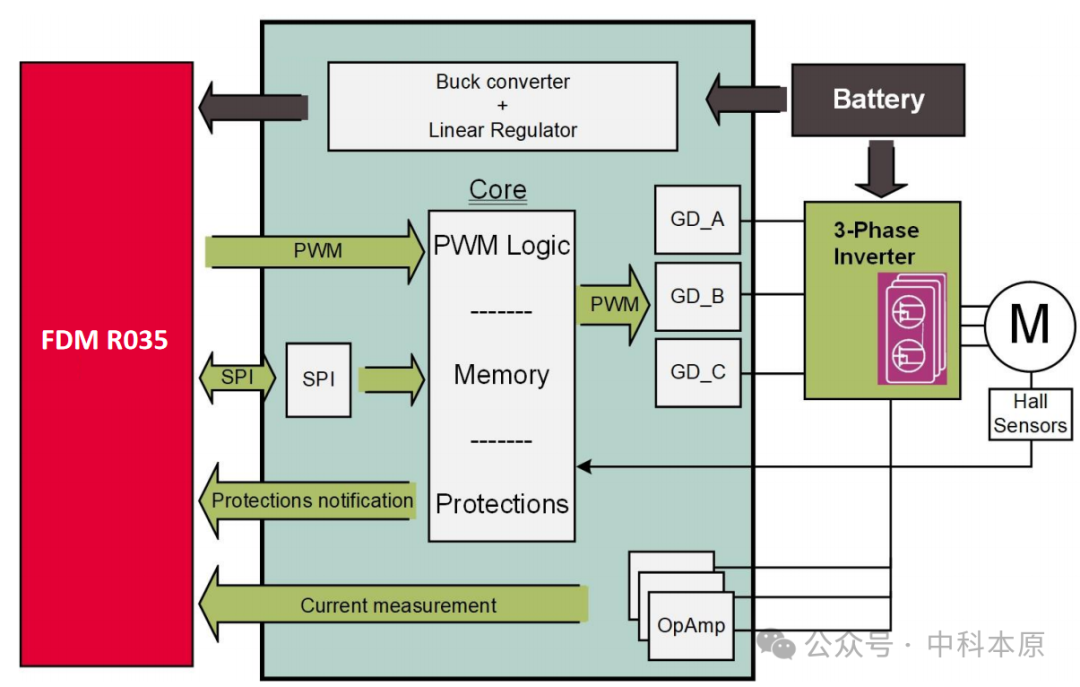
图5 FDM关节电机驱动器框架 该关节电机驱动器板卡如图6所示:
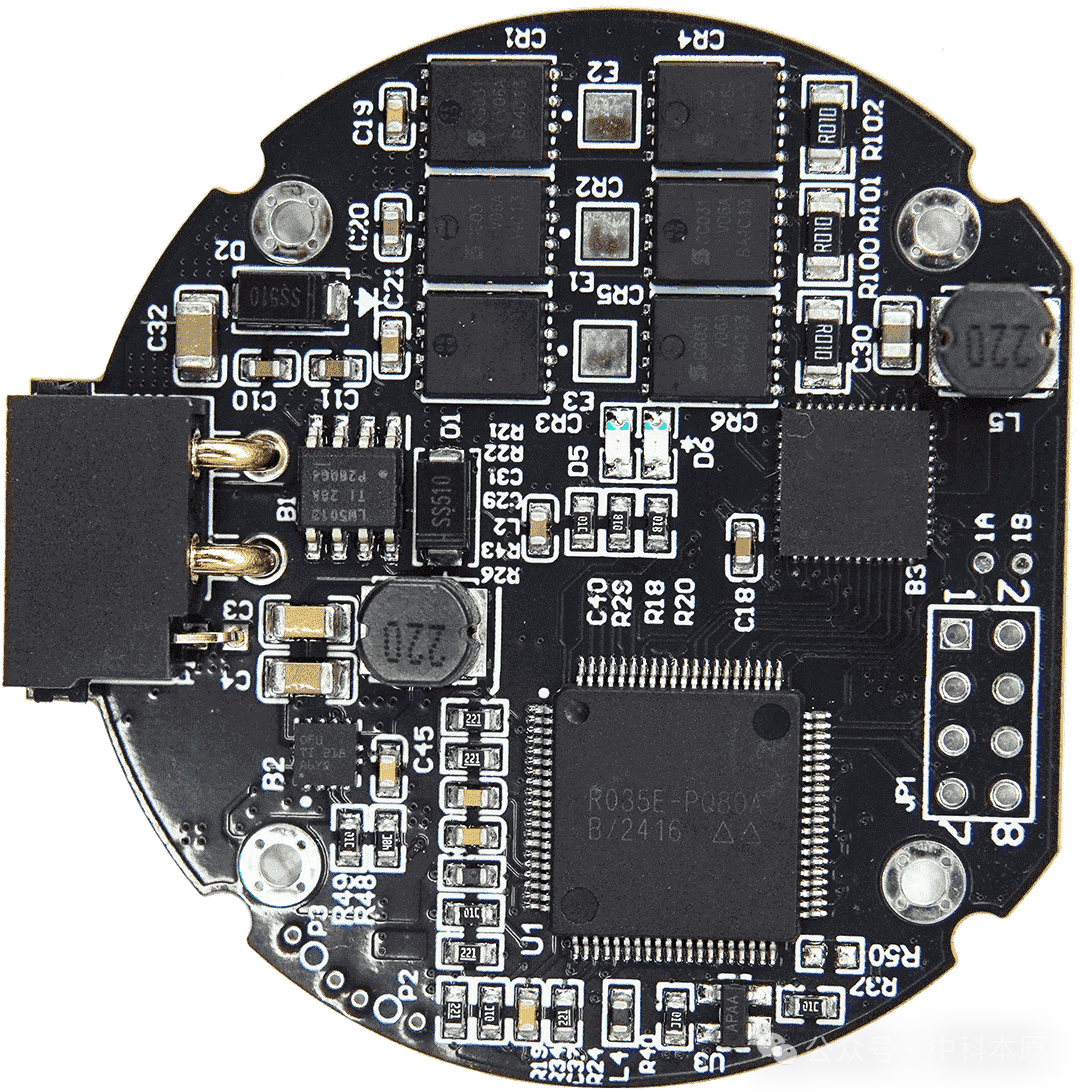
图6FDM关节电机驱动器板卡
驱动算法介绍
在机器人关节控制中,传统的位置控制能够实现精准的轨迹跟踪,但在涉及人机交互、复杂环境适应、精密装配等应用时,仅靠位置控制难以满足柔性、安全和适应性的需求。因此,BenYuan关节电机采用了基于FOC的力位混合控制,用于平衡刚性控制与柔性控制的需求。
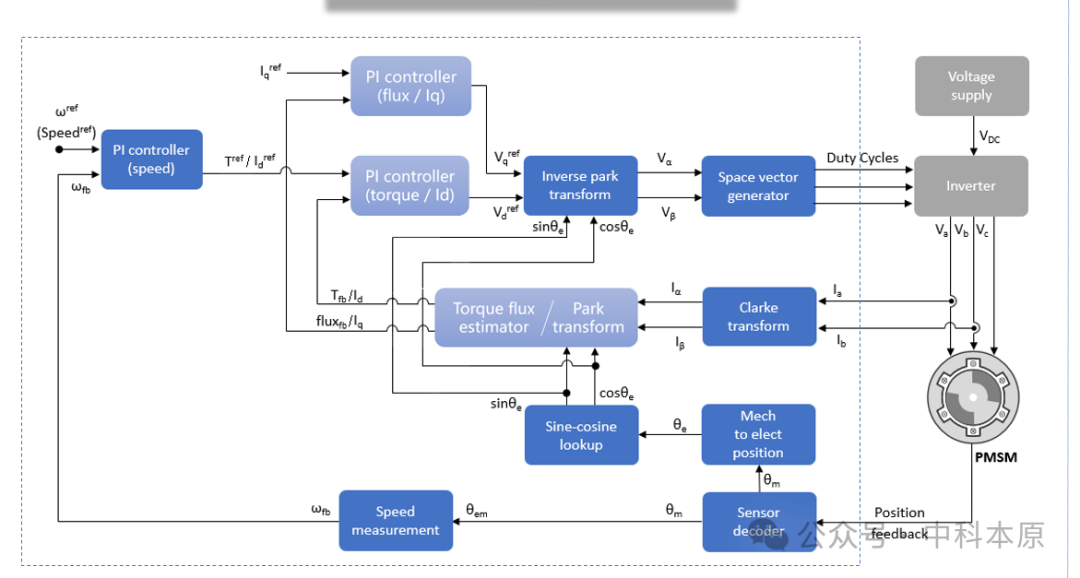
图7 控制算法框图
核心思想是通过数学变换,将三相电流转换为直流分量,随后使用PD控制器将电机在位置上的偏差反馈到力矩输出上,实现更精确的扭矩、速度和位置控制,同时提高效率并减少能耗。
BenYuan关节电机包含以下 5 个控制指令:
1)前馈力矩:
2)目标角度位置:
3)目标角速度:
4)位置(zhì)刚(gāng)度(dù):
5)速(sù)度刚度:
在(zài)力位混合控制中,使用PD控制器将电机在输出位置的偏差反馈到力矩输出上:
公式中,为关节电机的电机转子输出力矩;为当前电机转子的角度位置;为当前电机转子的角速度。
除算法外,我们还提供简单易(yì)用(yòng)的(de)上(shàng)位(wèi)机(jī)和(hé)丰(fēng)富(fù)的(de)API以(yǐ)方(fāng)便(biàn)用(yòng)户(hù)调(diào)试(shì)和(hé)进(jìn)行(xíng)系(xì)统(tǒng)集成(chéng)调(diào)用(yòng)。
总(zǒng)之(zhī),我(wǒ)们(men)提(tí)供(gōng)了(le)从(cóng)芯(xīn)片、关节电机驱动器和算法的完整解决方案,为用户的机器人产品开发提供全方位服务。
关节电机演示
以下是关节电机的正弦自动化测试:
从工厂到家庭:关节电机驱动智能未来
随着机器人技术的发展,关节电机作为核心驱动部件,正推动人形机器人从工业场景走向更广阔的应用空间。无论是在智能制造、医疗康复、物流搬运,还是未来的家庭服务、教育陪伴领域,先进的关节电机都在赋予机器人更高的灵活性、精准性和智能性,为人类社会带来深远变革。在工业领域,BenYuan关节电机可广泛应用于智能工厂。传统工业机器人多采用刚性传动,而BenYuan关节电机结合力控和位置控制技术,使机器人能在复杂环境中柔顺作业,适应柔性制造的需求。此外,高扭矩密度和精准控制能力的特点,使得BenYuan关节电机能处理更精细的操作,例如电子元件装配、汽车制造等高要求场景。
然而,BenYuan关节电机的应用并不止步于工厂。随着人形机器人正加速进入家庭场景,成为未来智能助手。家用机器人需要在复杂环境中自主移动、执行多任务操作,如协助家务、照顾老人、陪伴儿童等。相比传统电机,本原关节电机具备更轻量化、更高效的特性,使家庭机器人拥有接近人类的自然动作能力。例如,BenYuan关节电机可实现机器人轻松完成精细抓取,安全地与人互动,而不会造成误伤。
在医疗康复领域,外骨骼机器人和康复机器人依赖关节电机提供稳定的辅助力,帮助(zhù)患者进行康复训练或增强行动能力。高精度的力矩控制和响应速度,使这些机器人能够适应不同患者的需求,提供更个性化、更安全的康复体验。
从工厂的高效生产到家庭的智能陪伴,关节电机正在驱动人形机器人从工业向生活延伸,塑造未来的智能世(shì)界(jiè)。随(suí)着(zhe)技(jì)术(shù)不(bù)断(duàn)突(tū)破(pò),机(jī)器(qì)人(rén)将(jiāng)更(gèng)加(jiā)灵(líng)活(huó)、智(zhì)能(néng)、安(ān)全,让(ràng)智(zhì)能(néng)生(shēng)活(huó)真(zhēn)正(zhèng)走(zǒu)进(jìn)千(qiān)家(jiā)万(wàn)户(hù)。
相关新闻







联系我们
地址:山东省济南市槐荫区兴福街道齐鲁大道3189号西进时代中心
电话:15898523365
传真:15898523365
邮箱:service@Kaiyun.cco
网址:http://www.rjptj.com

