






07
2025
-
03
智元机器人基于NVIDIA Isaac GR00T打造高效仿真数据采集方案
浏览:489
发布:2025-03-07 20:02:39
案例简介
本案例中,智元机器人基于 NVIDIA Isaac GR00T-Teleop & GR00T-Mimic 提供的远程仿真操作功能和强大的模仿学习合成数据生成工作流,打造了支持高保真模拟和多维度泛化的大型机器人仿真框架 Genie Sim,并推出 AgiBot Digital World(agibot-digitalworld.cn)机器人海量仿真数据集。
本案例中使用了 NVIDIA Isaac GR00T。
NVIDIA Isaac GR00T
加速仿真数采方案
模仿学习是机器人技术发展的关键方向之一,通过观察和模仿人类专家的示范,机器人能够快速掌握新技能。然而,高质量示范数据的采集往往耗时费力且成本高昂,这严重制约了机器人学习的效率。
为了解决这一难题,智元机器人推出了基于 NVIDIA Isaac GR00T-Teleop 和 GR00T-Mimic 技术的仿真(zhēn)大(dà)规模数据采集方(fāng)案(àn)和(hé)海(hǎi)量开源仿真数据集 AgiBot Digital World,更高效地解决机器人数据稀缺的问题。
智元的仿真数据生成方案借助 Isaac Sim 高度逼真的视觉渲染和精确的物理引擎,精(jīng)准(zhǔn)还(hái)原机器人的(de)训(xun)练(liàn)环(huán)境(jìng),并(bìng)结(jié)合(hé) GR00T-Teleop 远(yuǎn)程(chéng)操(cāo)作(zuò)和 GR00T-Mimic 的数据增(zēng)广(guǎng)技(jì)术,快速生成高质量且多样化的专家轨迹数据。
这不仅大幅降低了(le)数(shù)据(jù)采集的成本和(hé)时(shí)间(jiān),还(hái)为机器人模型训练提供了丰富的仿真数据资源,帮助机器人更(gèng)高(gāo)效(xiào)地(de)融(róng)入(rù)人类社会,推动各行各业的智能化转型。
运用 GR00T-Teleop
加速仿真机器人数据(jù)采集
智元机器人利用 GR00T-Teleop 打造了更加高效易用的仿真遥操作方法。GR00T-Teleop 是 NVIDIA Project GR00T 的核心模块之一,它通过 VR/AR 设备实现实时远程(chéng)操(cāo)控(kòng),将(jiāng)远程操作数(shù)据(jù)流传输到 NVIDIA Isaac Sim 和 NVIDIA Isaac Lab,使(shǐ)操作者能够精准控制机器人在仿(fǎng)真(zhēn)环(huán)境(jìng)中(zhōng)完(wán)成复杂动作和(hé)任(rèn)务(wu),为(wèi)模(mó)仿学习提供(gōng)高(gāo)质(zhì)量的仿真训练数据,显著降(jiàng)低(dī)了(le)机(jī)器(qì)人(rén)技(jì)能(néng)开(kāi)发(fā)的(de)门(mén)槛(kǎn)。
GR00T-Teleop 支(zhī)持(chí)基(jī)于(yú) Apple Vision Pro 的(de)远(yuǎn)程(chéng)操(cāo)作(zuò),智(zhì)元(yuán)在(zài)此(cǐ)基(jī)础(chǔ)上(shàng)与(yǔ) NVIDIA 联(lián)合(hé)开(kāi)发(fā),推(tuī)出(chū)了(le)适(shì)配(pèi) PICO 的(de)远(yuǎn)程(chéng)操作解决方案(àn)。这(zhè)一创新方案(àn)已(yǐ)成(chéng)功集成到 Genie Sim 仿真框架,为大规模仿真数据生产与开源计划提供了强大的数据采集支持,进一步拓宽了技术的应用场景,让机器人数据采集更加高效便捷。
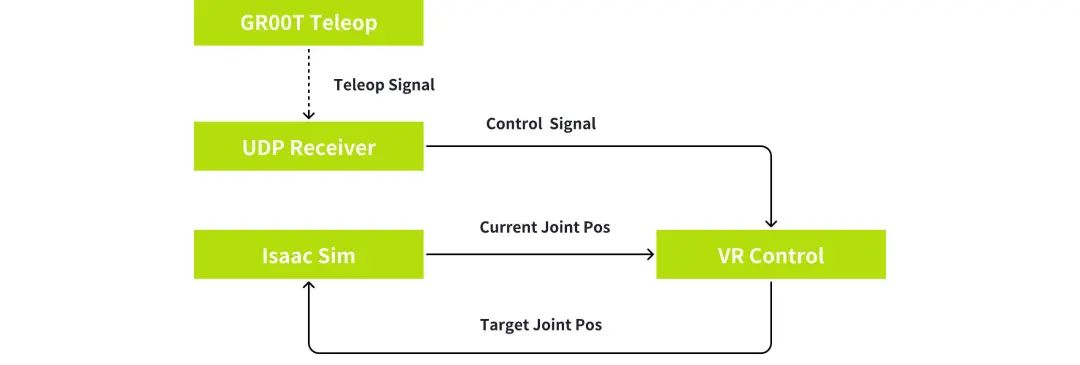
Genie Sim 基于 GR00T-Teleop 的仿真远程操作架构
GR00T-Teleop 中的仿真远程操作
用户通过佩戴 PICO VR 设备,利用手柄实时控制 Isaac Sim 中智元 AgiBot G1 机器人的手臂、腰部和底盘运动。其中,手臂的控制最为复杂,系统需要(yào)实(shí)时(shí)读(dú)取(qǔ)机(jī)器(qì)人(rén)的(de)当(dāng)前(qián)关节(jié)角(jiǎo)度(dù)。当(dāng)用(yòng)户(hù)移(yí)动(dòng)手(shǒu)柄(bǐng)时(shí),控(kòng)制(zhì)指(zhǐ)令(lìng)会(huì)同(tóng)步(bù)发(fā)送(sòng)到(dào)仿(fǎng)真(zhēn)系(xì)统(tǒng)。基(jī)于(yú)逆(nì)运(yùn)动学算法,系统会结合当前关节角度与指令数据,实时解算出目标关节角度,并驱动仿真环境中的机器人完成精准的关节位姿控制。
这一过程实现了从指令输入到动作执行的高效闭环,充分展现了远程操作技术(shù)在(zài)机(jī)器(qì)人(rén)仿(fǎng)真(zhēn)控(kòng)制(zhì)中(zhōng)的(de)核(hé)心(xīn)作(zuò)用(yòng)与(yǔ)强(qiáng)大(dà)能(néng)力(lì)。

通(tōng)过(guò)远(yuǎn)程(chéng)操(cāo)作(zuò)采集仿(fǎng)真(zhēn)数(shù)据(jù)
通(tōng)过(guò) GR00T-Mimic
实(shí)现(xiàn)从(cóng)人(rén)工(gōng)示(shì)教(jiào)到(dào)海(hǎi)量(liàng)泛(fàn)化(huà)
在(zài) GR00T-Teleop 为(wèi)具(jù)身(shēn)大(dà)模(mó)型(xíng)训(xun)练(liàn)提(tí)供(gōng)高(gāo)效(xiào)且(qiě)拟(nǐ)人(rén)的(de)仿(fǎng)真(zhēn)数(shù)据(jù)采集功(gōng)能(néng)的(de)基(jī)础(chǔ)上(shàng),智(zhì)元(yuán)机(jī)器人还运用 GR00T-Mimic 以少量人类示范生成大量合成运动轨迹数据,实现数据采集规(guī)模(mó)的指数级扩展。
智元机器人将 GR00T-Mimic 深(shēn)度(dù)集成至 Genie Sim 仿真框架中。通过对 GR00T-Teleop 采集的初始轨迹数据进行智能泛化,智元仿真团队成功将其扩展为数千条高精度运动轨迹。这些轨迹在 Isaac Sim 仿真环境(jìng)中进行自动化验证后(hòu),被高效转化为具身大模型的训练数据。
这一创新流程不仅大幅提升了仿真数据采集效率,更为具身大模型训练提供了前所未有的高质量仿真数据集,为智能机器人的算法研发打造(zào)了(le)坚(jiān)实的数据基础。
使用 GR00T-Mimic 生成大量合成轨迹
智元 Genie Sim:
加速机器人开发的仿真框架
智元机器人的 Genie Sim 仿真框架通过深度集成 GR00T-Teleop 和 GR00T-Mimic 技术,结合大规模、高精度的三维资产库,为开发者提供了高效的数据生成能力。
基于 NVIDIA 的强大计算平(píng)台(tái)和(hé)智(zhì)元(yuán)的(de)创(chuàng)新(xīn)应(yīng)用(yòng),开(kāi)发(fā)者(zhě)能(néng)够(gòu)在(zài)短(duǎn)时(shí)间(jiān)内(nèi)积(jī)累(lèi)海(hǎi)量(liàng)机(jī)器(qì)人(rén)仿(fǎng)真(zhēn)数(shù)据,显著降低数据采集成本,同时提升数据多样性与质量。这一能力为机器人模型的训练与优化奠定了坚实基础。
此外,智元机器人的仿真框架构建了从轨迹生成、模型训练、基准测试到部署验证的完整评估闭环,并通过(guò)高效的仿真(zhēn)工(gōng)具(jù)链(liàn),帮(bāng)助(zhù)用(yòng)户(hù)快(kuài)速(sù)验(yàn)证(zhèng)算(suàn)法(fǎ)性(xìng)能(néng)并(bìng)优(yōu)化(huà)模(mó)型(xíng)。无(wú)论(lùn)是(shì)简(jiǎn)单(dān)的(de)抓(zhuā)取(qǔ)任(rèn)务(wu)还是复杂的长程操作,Genie Sim 都能提供高度还原的仿真环境与精准的评测指标,助力开发者高效完成机器人技术的开发与迭代。
通过与 NVIDIA 的深度(dù)合(hé)作(zuò),智(zhì)元(yuán)进(jìn)一(yī)步(bù)提(tí)升(shēng)了(le)仿(fǎng)真(zhēn)框(kuāng)架(jià)的(de)性(xìng)能(néng)与(yǔ)可(kě)扩(kuò)展(zhǎn)性(xìng),为(wèi)机(jī)器(qì)人(rén)技(jì)术(shù)的(de)创(chuàng)新(xīn)与(yǔ)应(yīng)用(yòng)落(luò)地(de)提(tí)供(gōng)了(le)强(qiáng)有(yǒu)力(lì)的(de)支(zhī)持(chí)。
相关新闻







联系我们
地址:山东省济南市槐荫区兴福街道齐鲁大道3189号西进时代中心
电话:15898523365
传真:15898523365
邮箱:service@Kaiyun.cco
网址:http://www.rjptj.com

