






14
2025
-
03
RDK X3暴改机器人:手搓能爬楼的AI快递员会爬楼能唠嗑
浏览:481
发布:2025-03-14 13:00:25
随(suí)着(zhe)城(chéng)市(shì)化(huà)进(jìn)程(chéng)的(de)加(jiā)快(kuài),高(gāo)楼(lóu)越(yuè)来(lái)越(yuè)多(duō),高(gāo)层(céng)建(jiàn)筑(zhù)的(de)多(duō)层和高人口密度让物品配送变得复杂。虽然配送机器人可以解决“最后一公里”的问题,但现有的机器人主要依赖电梯跨楼层。电梯高峰时段效率低,且占用电梯资源,遇到没有电梯的楼宇更是束手无策。因此,既能搭电梯又能爬楼的配送机器人,正是市场上急需的创新。
一、项目介绍:
这款作品是基于 RDK X3开发板打造的跨楼层智能配送机器人,能轻松切换行驶模式和爬楼模式。配备可伸缩的爬楼轮结构,不论楼梯多陡或多窄,它都能“爬得上去”,跨层配送so easy!不(bù)仅(jǐn)如此,机器人还内建视觉识别和语音识别功能(néng),可(kě)以(yǐ)和(hé)你(nǐ)“无(wú)声(shēng)无(wú)息(xi)”地(de)互(hù)动(dòng),快(kuài)递(dì)送(sòng)到(dào)手(shǒu),连(lián)说(shuō)话(huà)都(dōu)能(néng)省(shěng)力(lì)!——哈(hā)尔(ěr)滨(bīn)工(gōng)程(chéng)大(dà)学(xué) 碧(bì)海(hǎi)小(xiǎo)队(duì)
二(èr)、创(chuàng)新(xīn)点(diǎn):
目(mù)前(qián)市(shì)场(chǎng)上(shàng)的(de)配(pèi)送(sòng)机(jī)器(qì)人依赖电梯跨楼层,还需要人工手(shǒu)动(dòng)输(shū)入(rù)地(de)址(zhǐ),这(zhè)让(ràng)配(pèi)送(sòng)变得既不高效又不智能。为了弥补这些不足,本作品着重解决了这些“老大难”问题:
- 爬楼难题: 针对现有机器人无法爬楼梯的缺点,我们设计了一个四片分离式变形轮,电动推杆一拉一缩,轮毂翻转伸展,轻松上下楼梯。简直是机器人中的“楼梯小能手”!
- 智能配送: 摆脱手动输入地址的繁琐,我们通过OCR、NLP、ASR技术,操作人员只需拍照或者说话,机器人就能自动获取配送地址。语音反馈当前任务信息,跟机器人聊天就能完成配送任务,人机交互走向“智慧时代”!
- 路径规划: 通过激光雷达建图与障碍物检测,对A*算法进行了优化,提高了路径规划效率和质量,让机器人不再绕路而是“直达目标”。
三、原理分析 :
变形轮
为了提高配送效率并避(bì)免(miǎn)占(zhàn)用(yòng)电(diàn)梯(tī)空(kōng)间(jiān),机(jī)器(qì)人(rén)需(xū)要(yào)能(néng)够(gòu)上(shàng)下(xià)楼(lóu)梯(tī)和(hé)行(xíng)走(zǒu)。我(wǒ)们(men)设(shè)计(jì)了(le)可(kě)扩(kuò)式(shì)四(sì)轮(lún)结(jié)构(gòu),结(jié)合(hé)电(diàn)动(dòng)推(tuī)杆(gān)和(hé)电(diàn)机(jī)的(de)运(yùn)动(dòng),使(shǐ)机(jī)器(qì)人(rén)能(néng)够(gòu)轻(qīng)松(sōng)应(yīng)对(duì)楼(lóu)梯(tī)。
当(dāng)需(xū)要(yào)爬(pá)楼(lóu)梯(tī)时(shí),电(diàn)动(dòng)推(tuī)杆(gān)调(diào)整(zhěng)轮(lún)毂(gǔ)角(jiǎo)度(dù)并(bìng)向(xiàng)外(wài)扩(kuò)张(zhāng),提(tí)供(gōng)支(zhī)撑(chēng)力(lì);下(xià)楼(lóu)时(shí),轮(lún)毂(gǔ)自(zì)动(dòng)调(diào)整(zhěng),保(bǎo)持(chí)稳(wěn)定(dìng)。通(tōng)过(guò)这(zhè)种(zhǒng)设(shè)计(jì),机(jī)器(qì)人(rén)能(néng)适(shì)应(yīng)不(bù)同(tóng)楼(lóu)梯(tī)的(de)高(gāo)度(dù)和(hé)角(jiǎo)度(dù),确(què)保(bǎo)顺(shùn)利(lì)完(wán)成(chéng)楼(lóu)层(céng)间(jiān)的(de)配(pèi)送(sòng)任(rèn)务(wu)。
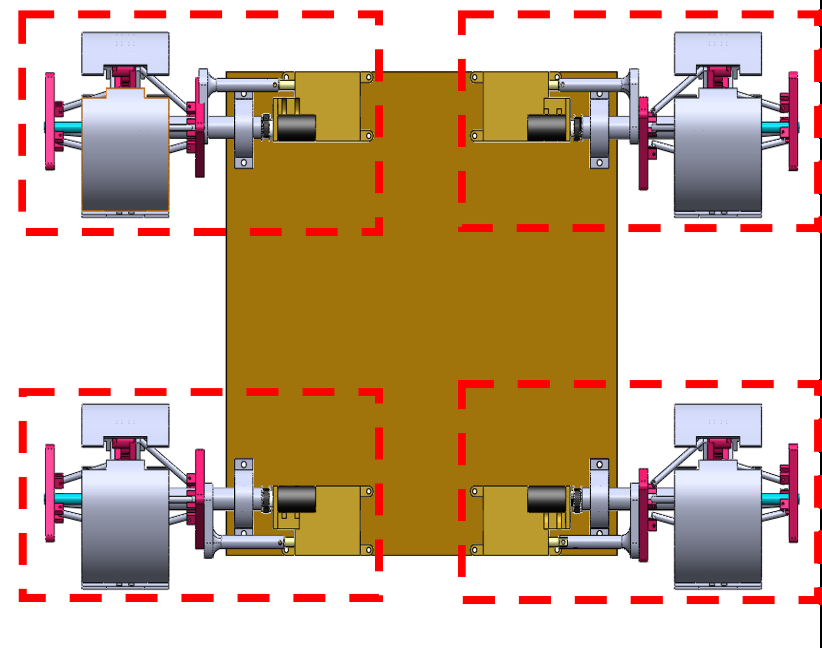
具(jù)体(tǐ)来(lái)说(shuō),每(měi)个(gè)移(yí)动(dòng)单(dān)元(yuán)由(yóu)三(sān)篇(piān)分(fēn)离(lí)式(shì)轮(lún)毂(gǔ)组(zǔ)成(chéng),为(wèi)了(le)应(yīng)对(duì)不(bù)同(tóng)高(gāo)度(dù)和(hé)宽(kuān)度(dù) 的(de)楼(lóu)梯(tī),我(wǒ)们(men)采用(yòng)四(sì)杆(gān)机(jī)构(gòu),通(tōng)过(guò)四(sì)杆(gān)机(jī)构(gòu)的(de)的(de)运(yùn)动(dòng)调(diào)整(zhěng)轮(lún)毂(gǔ)伸(shēn)缩(suō)的(de)距(jù)离(lí)及(jí)角(jiǎo)度(dù)。

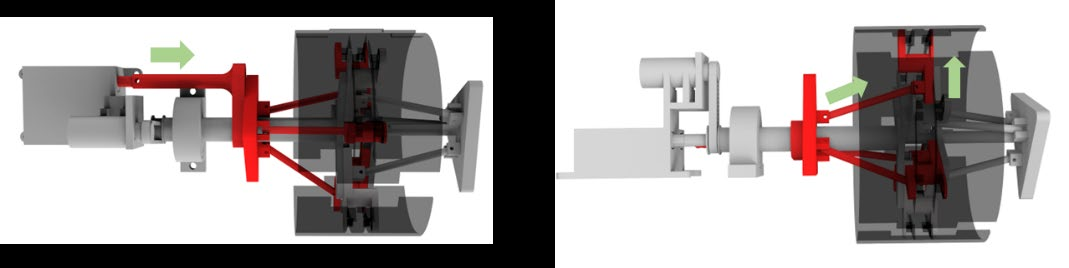
上楼梯时:向里侧电动推杆施加正向电流,使得电动推杆伸长,通过左侧三 角板带动连杆向上运动,从而将轮毂翻转一定角度并向外扩张一定距离以适应楼 梯的高度和宽度。
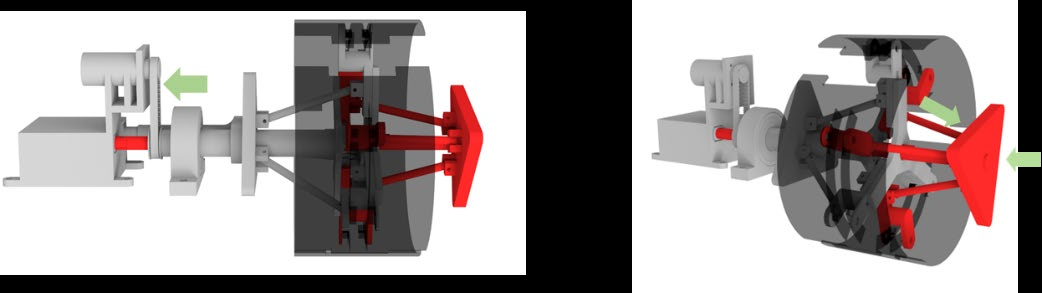
下楼梯时:向外侧电动推杆施加反向电流,使得推杆收缩,通过右侧三角板 带动连杆向下运动,从而将轮毂反方向翻转一定角度并向外扩张一定距离以适应 楼梯的高度和宽度。
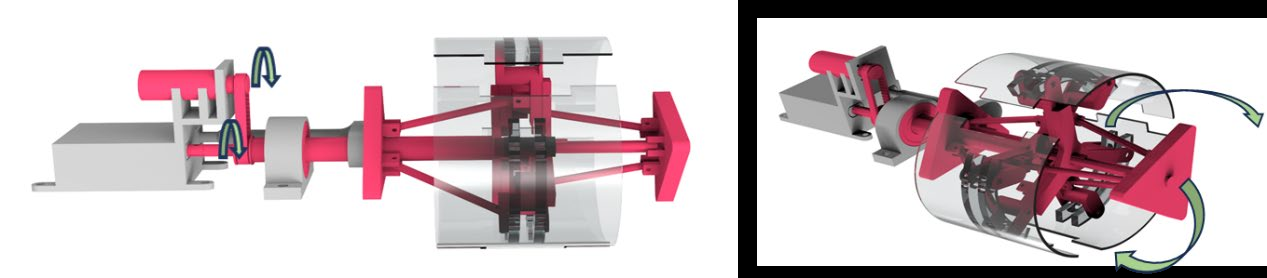
行(xíng)走(zǒu)时(shí):上(shàng)侧(cè)电(diàn)机(jī)通(tōng)过(guò)皮(pí)带(dài)带(dài)动(dòng)右(yòu)侧(cè)轮(lún)毂(gǔ)及(jí)三(sān)角(jiǎo)板(bǎn)一(yī)起(qǐ)旋(xuán)转(zhuǎn),从(cóng)而(ér)使(shǐ)得(de)机(jī)器(qì) 人(rén)向(xiàng)前(qián)运(yùn)动(dòng)
路径规(guī)划(huà)原(yuán)理(lǐ)
A算(suàn)法(fǎ)是(shì)一(yī)种(zhǒng)启(qǐ)发(fā)式(shì)搜(sōu)索(suǒ)算(suàn)法(fǎ),通(tōng)过(guò)从(cóng)起(qǐ)点(diǎn)开(kāi)始(shǐ)扩(kuò)展(zhǎn)邻(lín)域节(jié)点(diǎn),比(bǐ)较(jiào)节(jié)点(diǎn)的(de)代(dài)价(jià)值(zhí),选择代价最小的节点继续扩展,直到找到目标点,从而避开障碍物,找到最佳路径。传统的A算法存在节点过多、路径冗余以及不够平滑等问题,这不仅影响机器人的稳定性,还降低了路径规划的效率。我们做了以下优化。
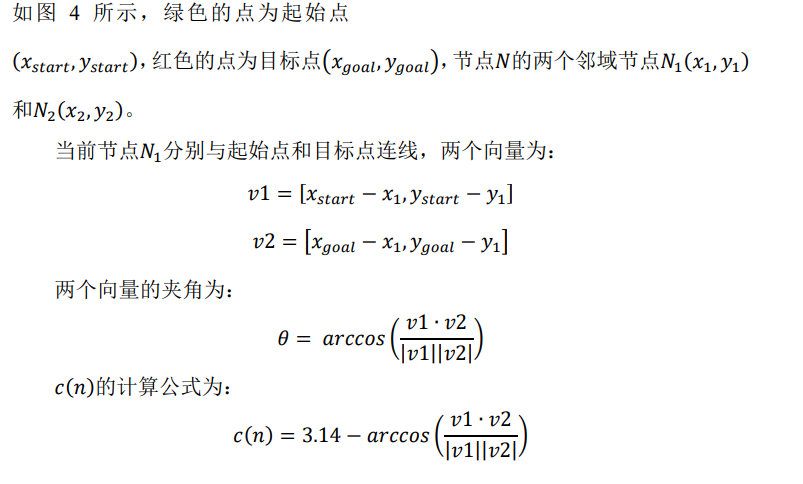
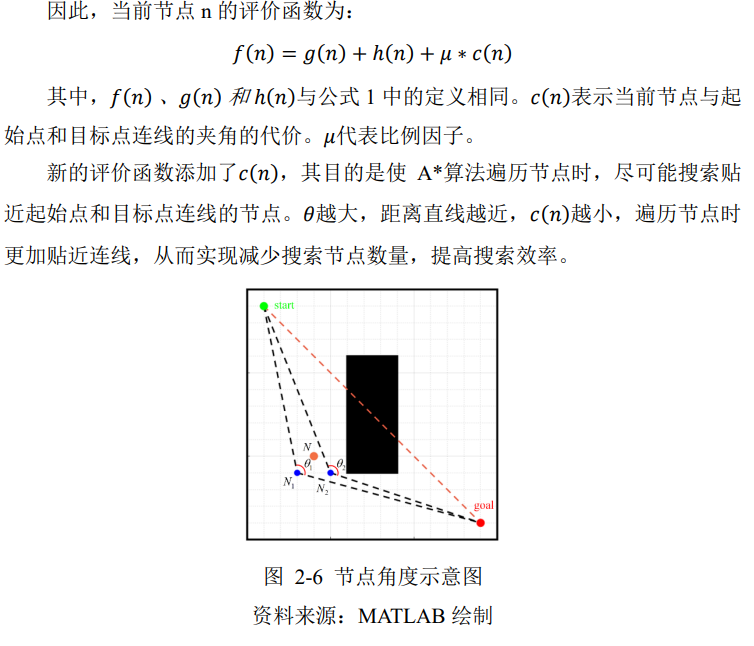
1、传统的 A-star算法只考虑了距离问题,没有考虑环境地图上的许多实际因 素。因此 我们在传统 A*算法评价函数的基础上,通过引入节点到起始点和目标 点连线的夹角,对评价函数进行改进。
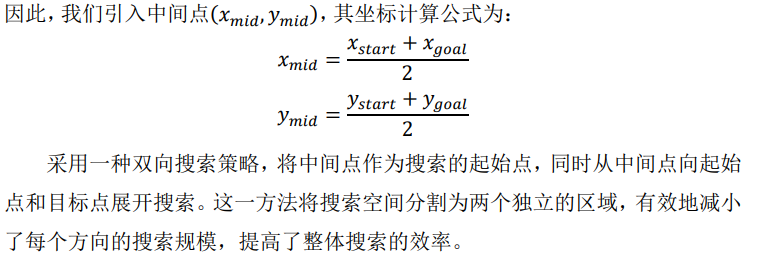
2、引(yǐn)入(rù)双(shuāng)向(xiàng)搜(sōu)索(suǒ)策(cè)略(è)。在(zài)大(dà)规(guī)模(mó)搜(sōu)索(suǒ)空(kōng)间(jiān)下(xià),传(chuán)统(tǒng)的 A*算法采用的单向搜索策略存在搜索效率低 搜索节点数量多等问题。
当计算出的中间点位于障碍物内部时,无法有效搜索到起点和目标点,因此需要选择新的中间点。具体步骤如下:
- 确定中间点的位置。
- 在中间点处绘制一条水平线和一条竖直线。
- 计算水平线和竖直线穿越障碍物的跨越长度。
- 选择跨越长度较长的方向,并找出最早穿越障碍物的点。
- 将最早穿越障碍物的点作为优化后的中间点。
3、去除冗余节点,在路径规划中,冗余节点可能导致内存占用过多和频繁调整机器人运动。为了解决这个问题,我们采用了一种路径优化方法(fǎ)来(lái)去(qù)除(chú)冗(rǒng)余(yú)节(jié)点(diǎn)。具(jù)体(tǐ)步(bù)骤(zhòu)如(rú)下(xià):
- 将(jiāng)起(qǐ)始(shǐ)点(diǎn)作(zuò)为(wèi)开(kāi)始(shǐ)节(jié)点(diǎn)。
- 沿(yán)路径预(yù)定(dìng)方(fāng)向(xiàng)逐(zhú)一(yī)连(lián)接(jiē)起(qǐ)始(shǐ)点(diǎn)与(yǔ)路径中(zhōng)的(de)各(gè)个(gè)节(jié)点(diǎn)。
- 如(rú)果(guǒ)连(lián)接(jiē)线(xiàn)段(duàn)与(yǔ)障(zhàng)碍(ài)物(wù)相(xiāng)交(jiāo),保(bǎo)留(liú)相(xiāng)交(jiāo)节(jié)点(diǎn)的(de)前(qián)一(yī)个(gè)节(jié)点(diǎn),移(yí)除(chú)与(yǔ)该(gāi)节(jié)点(diǎn)之(zhī)间(jiān)的(de)所(suǒ)有(yǒu)节(jié)点(diǎn),并(bìng)继(jì)续(xù)连(lián)接(jiē)后续节点。
- 如果连接线段不与障碍物相交,直到目标点,保留目标点并移除起始点与目标点之间的节点。
- 将保留的节点依次连接,形成优化后的路径。
人机交互部分
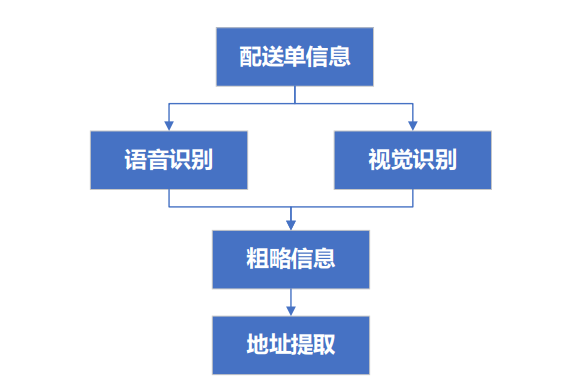
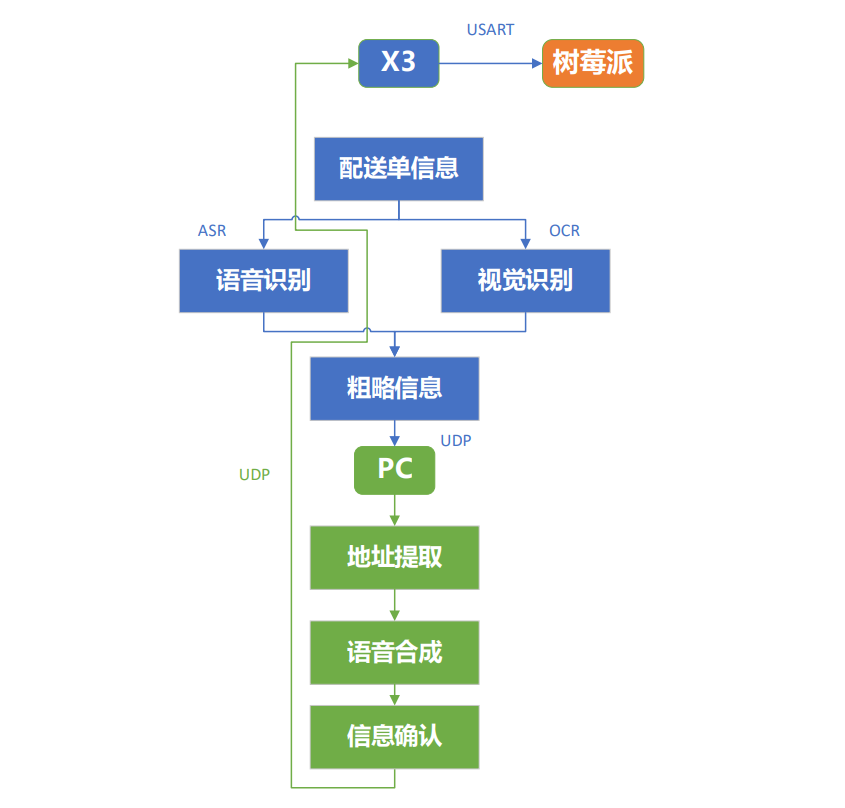
本项目的人机交互部分包括视觉识别和语音识别。首先,通过OCR技术识别配送单据并提取信息,再利用NLP技术获取最终配送地址。也可以通过语音指令下单,语音识别技术将语音转为文本,NLP技术提取出地址信息,并通过语音合成技术将地址反馈给操作员确认。
四、硬件系统设计 :
4.1硬件选型
4.1.1 RoboMaster M2006本作品中,电机采用 RoboMaster M2006直流无刷电机,其作用主要是控制 机器人的移动,控制机器人运动到达指定位置并实时反馈运动状态信息。 RoboMaster M2006使用C610电调进行驱动,使用CAN通信协议发送接收数据, 电机内置位置传感器,实时反馈转子机械角度、转速和转矩等信息。
4.1.2电动推杆 在本作品中,一个变形轮需要两个电动推杆,电动推杆又有两种状态——伸 出和缩回。一根推杆的伸缩控制变形轮的变大程度,另一根推杆的(de)伸(shēn)缩(suō)控(kòng)制(zhì)变(biàn)形(xíng) 轮(lún)的(de)旋(xuán)转(zhuǎn)角(jiǎo)度(dù)。作(zuò)用(yòng)是(shì)通(tōng)过(guò)推(tuī)杆(gān)的(de)伸(shēn)缩(suō)使(shǐ)轮(lún)子(zi)达(dá)到(dào)特(tè)定(dìng)的(de)扩(kuò)大(dà)程(chéng)度(dù)和(hé)旋(xuán)转(zhuǎn)角(jiǎo)度(dù)。
4.1.3 TFT-LCD触(chù)摸(mō)屏(píng) 在(zài)本(běn)作(zuò)品(pǐn)中(zhōng),LCD触(chù)摸(mō)屏(píng)的(de)主要(yào)作(zuò)用(yòng)是(shì)显(xiǎn)示(shì)经(jīng) RDK X3 分(fēn)析(xī)处(chù)理(lǐ)后(hòu)的(de)配(pèi)送(sòng) 地(de)址(zhǐ),取(qǔ)件(jiàn)码(mǎ)等(děng)信(xìn)息(xi)。本(běn)作(zuò)品(pǐn)采用(yòng)的(de)是(shì)正(zhèng)点(diǎn)原(yuán)子(zi) 2.8寸(cùn)的(de) TFTLCD液(yè)晶(jīng)屏(píng)。

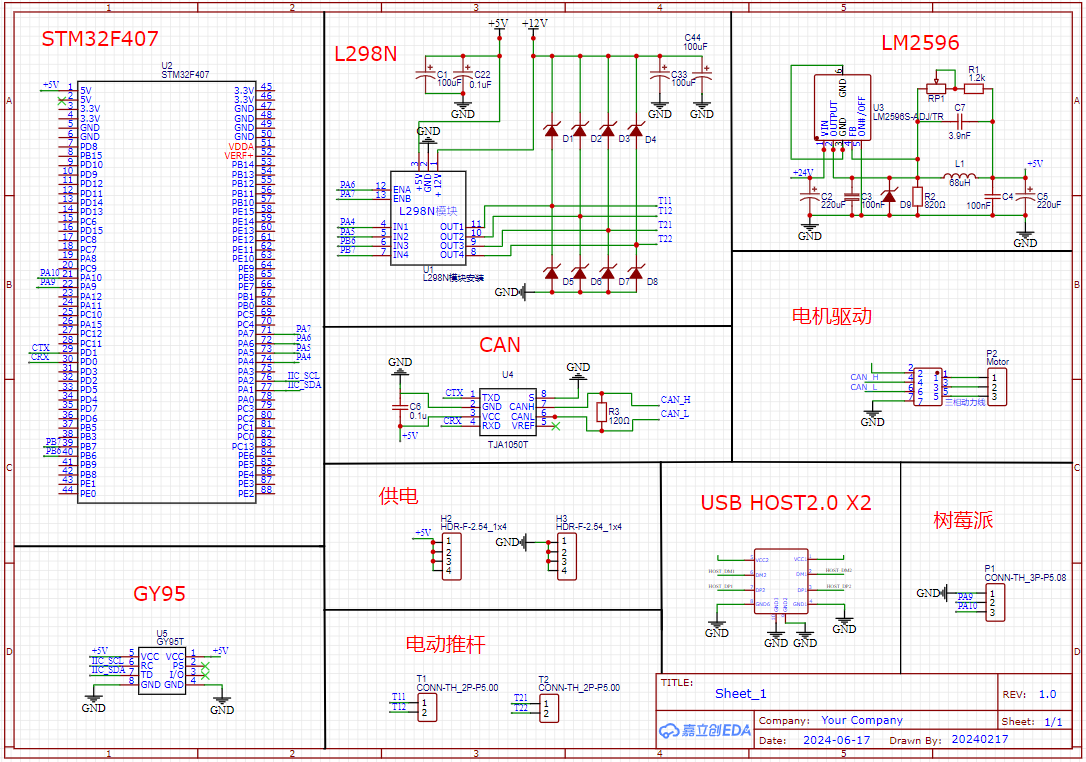
4.3硬件电路设(shè)计(jì)
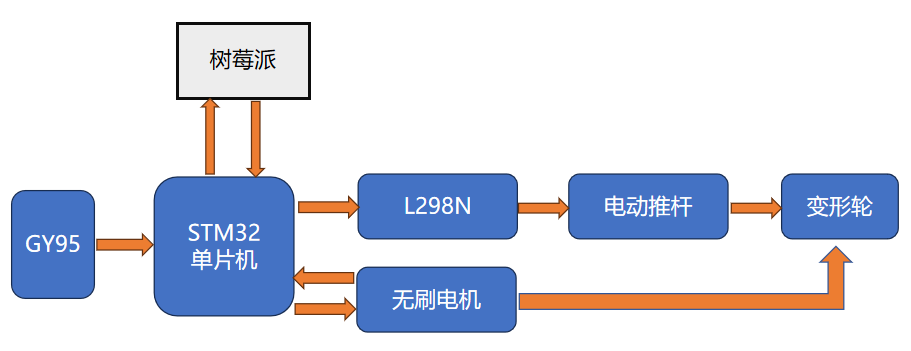
本(běn)系(xì)统(tǒng)的(de)硬(yìng)件(jiàn)连(lián)接(jiē)方(fāng)式(shì)如(rú)下(xià):树(shù)莓(méi)派(pài)负(fù)责(zé)读(dú)取(qǔ)相(xiāng)机(jī)图(tú)像(xiàng)数(shù)据(jù)和(hé)地(de)图(tú)建(jiàn)模(mó),并(bìng)将(jiāng)里(lǐ)程(chéng)计(jì)数(shù)据(jù)发(fā)送(sòng)给(gěi)STM32来控制机器人移动。RDK X3主要处理语音交互和视觉识别,并在屏幕和触摸屏上显示结果。STM32控制机器人的底盘运动,通过CAN总线控制电机转动,通过PWM波控制电动推杆的伸缩,并与树莓派实时通信,反馈机器人运动状态信息。
五、软件设计与流程
5.1建图与规划流程
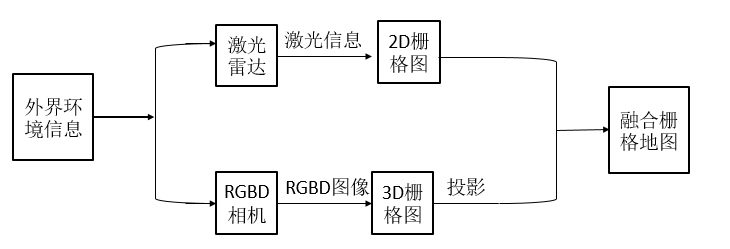
SLAM建图使用三种地图:点云图、栅格图和八叉树地图。虽然激光雷达只能在二维场景中建图,但它具有较高精度和更远的建图范围,且受外界环境影响较小。路径规划中采用2D占用栅格图模式。激光雷达提供精确的二维信息,而深度相机提供三维信息。为了提高地图精度,本设计结合了激光雷达和RGBD相机的信息来建立栅格图,使用激光雷达和深度相机的融合数据,生成2D栅格地图,并与Cartgrapher算法建立的地图融合,得到最终的综合地图。
5.2人(rén)机(jī)交(jiāo)互(hù)流(liú)程(chéng) 本(běn)项(xiàng)目(mù)的(de)人(rén)机(jī)交(jiāo)互(hù)过(guò)程(chéng)如(rú)图(tú)所(suǒ)示(shì),通(tōng)过(guò)视(shì)觉(jué)或(huò)语(yǔ)音(yīn)方(fāng)式(shì)识(shi)别出最终配送地点 并传输给树莓派作为最终导航地点。
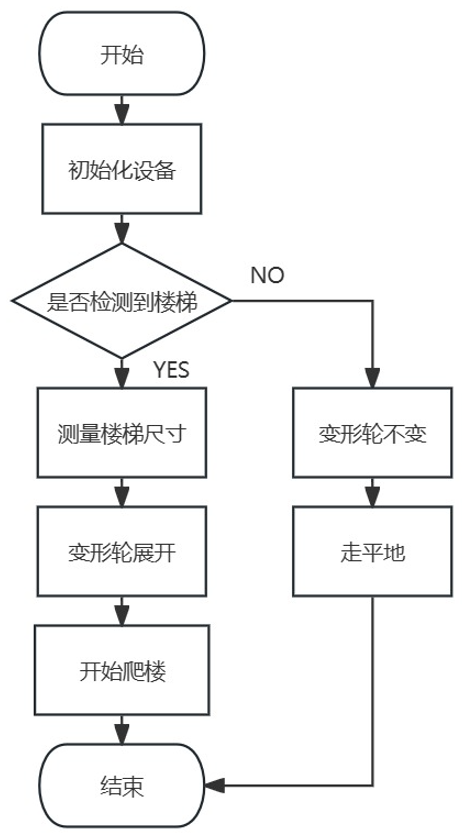
5.3底盘控制软件流程 在本作品中,底盘控制采用 STM32单片机作为主控芯片,其程序结构图如 图所示。当机器人在运动的过程中,会不断检测前方是否有楼梯,没有检测到楼 梯,变形轮不变形维持原状;当检测到楼梯,根据测量的楼梯尺寸,STM32控制 变形轮变形到特定的扩大程度和旋转角(jiǎo)度(dù)后(hòu),开(kāi)始(shǐ)爬(pá)楼(lóu)。
六、系统测试
6.1机械结构测试
验证机械结构可行性、操作稳定性及功能完备性。测试确认:
变形轮通过电动推杆伸缩实现轮毂角度与扩张距离调节,满足楼梯尺寸自适应需求。
结构设计合理,通过仿真与实际测试验证,可稳定完成爬楼与行走模式切换。
6.2目标检测测试
流程与结果:
数据集构建:采集图像并标注,转换为YOLOv5s适配格式(图片+txt)。
模型训练:基于YOLOv5s,训练后输出评估指标:
- Precision: 0.6086
- Recall: 0.5641
- mAP@0.5: 0.5703
- mAP@0.5:0.95: 0.3221
实测效果:成功检测目标,满足基础需求,但精度待优化。
5.3底盘控制测试
电动推杆:PWM控制精度达标,可精准调节变形轮扩张与角度。
里程计:STM32实时读取速度、加速度、位置信息,误差<5%。
结论:底盘控制稳定,满足多模式运动需求。
5.4 SLAM建图测试
方法对比:
激光雷达:建图范围广,但易受环境缝隙干扰。
RGBD相机:受光照影响,边界模糊。
融合方案:激光雷达+RGBD投影融合,生成高精度2D栅格地图,消除缝隙干扰,边界清晰。
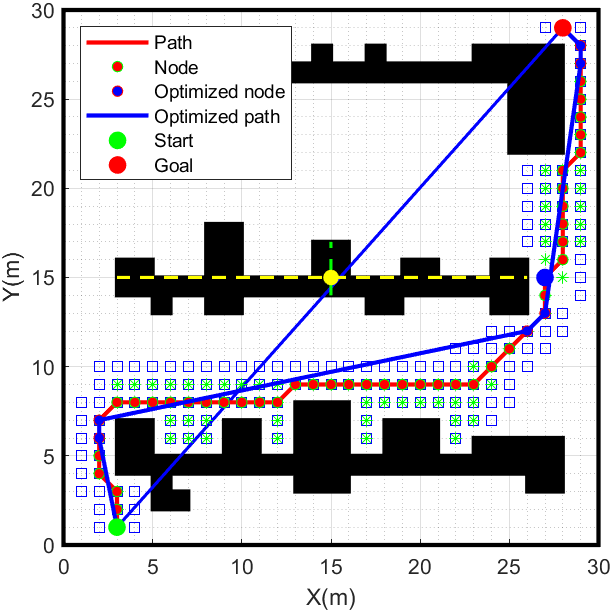
5.5路径规划测试
改进A*算法(对比传统A*):
搜索节点数减少30%,路径长度缩短15%,规划时间降低25%。
冗余节点去除后,路径平滑度提升,内存占用减少20%。
5.6人机交互测试
OCR+NLP:成功从虚拟配送单提取地址,准确率>85%。
ASR+NLP:语音指令中地址抽取准确率>80%,支持模糊语义(如“送到三号楼二层”)。
语音反馈:合成语音播报任务信息,用户可确认指令正确性。
关键结论
- 各模块功能均通过测试,满足跨楼层配送需求。
- 目标检测与路径规划精度待优化,可通过扩展数据集与算法调参进一步提升。
随着城市化进程的加快,高楼越来越多,高层建筑的多层和高人口密度让物品配送变得复杂。虽然配送机器人可以解决“最后一公里”的问题,但现有的机器人主要依赖电梯跨楼层。电梯高峰时段效率低,且占用电梯资源,遇到没有电梯的楼宇更是束手无策。因此,既能搭电梯又能爬楼的配送机器人,正是市场上急需的创新。
一、项目介绍:
这款作品是基于 RDK X3开发板打造的跨楼层智能配送机器人,能轻松切换行驶模式和爬楼模式。配备可伸缩的爬楼轮结构,不论楼梯多陡或多窄,它都能“爬得上去”,跨层配送so easy!不仅如此,机器人还内建视觉识别和语音识别功能,可以和你“无声无息”地互动,快递送到手,连说话都能省力!——哈尔滨工程大学 碧海小队
二、创新点:
目前市场上的配送机器人依赖电梯跨楼层,还需要人工手动输入地址,这让配送变得既不高效又不智能。为了弥补这些不足,本作品着重解决了这些“老大难”问题:
- 爬楼难题: 针对现有机器人无法爬楼梯的缺点,我们设计了一个(gè)四(sì)片(piàn)分(fēn)离(lí)式(shì)变(biàn)形(xíng)轮(lún),电(diàn)动(dòng)推(tuī)杆(gān)一(yī)拉(lā)一(yī)缩(suō),轮(lún)毂(gǔ)翻(fān)转(zhuǎn)伸(shēn)展(zhǎn),轻(qīng)松(sōng)上(shàng)下(xià)楼(lóu)梯(tī)。简(jiǎn)直(zhí)是(shì)机(jī)器(qì)人(rén)中(zhōng)的(de)“楼(lóu)梯(tī)小(xiǎo)能(néng)手(shǒu)”!
- 智(zhì)能(néng)配(pèi)送(sòng): 摆(bǎi)脱(tuō)手(shǒu)动(dòng)输(shū)入(rù)地(de)址(zhǐ)的(de)繁(fán)琐(suǒ),我(wǒ)们(men)通(tōng)过(guò)OCR、NLP、ASR技(jì)术(shù),操(cāo)作(zuò)人(rén)员(yuán)只(zhǐ)需(xū)拍(pāi)照(zhào)或(huò)者(zhě)说(shuō)话(huà),机(jī)器(qì)人(rén)就(jiù)能(néng)自(zì)动(dòng)获(huò)取(qǔ)配(pèi)送(sòng)地(de)址(zhǐ)。语(yǔ)音(yīn)反(fǎn)馈(kuì)当(dāng)前(qián)任(rèn)务(wu)信(xìn)息(xi),跟(gēn)机(jī)器(qì)人(rén)聊(liáo)天(tiān)就(jiù)能(néng)完(wán)成(chéng)配(pèi)送(sòng)任(rèn)务(wu),人(rén)机(jī)交(jiāo)互(hù)走(zǒu)向(xiàng)“智(zhì)慧(huì)时(shí)代(dài)”!
- 路径规(guī)划(huà): 通(tōng)过(guò)激(jī)光(guāng)雷(léi)达(dá)建(jiàn)图(tú)与(yǔ)障(zhàng)碍(ài)物(wù)检(jiǎn)测(cè),对(duì)A*算(suàn)法(fǎ)进(jìn)行(xíng)了(le)优(yōu)化(huà),提(tí)高(gāo)了(le)路径规(guī)划(huà)效(xiào)率(lǜ)和(hé)质(zhì)量(liàng),让(ràng)机(jī)器(qì)人(rén)不(bù)再(zài)绕(rào)路而(ér)是(shì)“直(zhí)达(dá)目(mù)标(biāo)”。
三(sān)、原(yuán)理(lǐ)分(fēn)析(xī) :
变(biàn)形(xíng)轮(lún)
为了提高配送效率并避免占用电梯空间,机器人需要能够上下楼梯和行走。我们设计了可扩式四轮结构,结合电动推杆和电机的运动,使机器人能够轻松应对楼梯。
当需要爬楼梯时,电动推杆调整轮毂角度并向外扩张,提供支撑力;下楼时,轮毂(gǔ)自(zì)动(dòng)调(diào)整(zhěng),保(bǎo)持(chí)稳(wěn)定(dìng)。通(tōng)过(guò)这(zhè)种(zhǒng)设(shè)计(jì),机(jī)器(qì)人(rén)能(néng)适(shì)应(yīng)不(bù)同(tóng)楼(lóu)梯(tī)的(de)高(gāo)度(dù)和(hé)角(jiǎo)度(dù),确(què)保(bǎo)顺(shùn)利(lì)完(wán)成(chéng)楼(lóu)层(céng)间(jiān)的(de)配(pèi)送(sòng)任(rèn)务(wu)。
具(jù)体(tǐ)来(lái)说(shuō),每(měi)个(gè)移(yí)动(dòng)单(dān)元(yuán)由(yóu)三(sān)篇(piān)分(fēn)离(lí)式(shì)轮(lún)毂(gǔ)组(zǔ)成(chéng),为(wèi)了(le)应(yīng)对(duì)不(bù)同(tóng)高(gāo)度(dù)和(hé)宽(kuān)度(dù) 的(de)楼(lóu)梯(tī),我(wǒ)们(men)采用(yòng)四(sì)杆(gān)机(jī)构(gòu),通(tōng)过(guò)四(sì)杆(gān)机(jī)构(gòu)的(de)的(de)运(yùn)动(dòng)调(diào)整(zhěng)轮(lún)毂(gǔ)伸(shēn)缩(suō)的(de)距(jù)离(lí)及(jí)角(jiǎo)度(dù)。
上楼梯时:向里侧电动推杆施加正向电流,使得电动推杆伸长,通过左侧三 角板带动连杆向上运动,从而将轮毂翻转一定角度并向外扩张一定距离以适应楼 梯的高度和宽(kuān)度(dù)。
下楼梯时:向外侧电动推杆施加反向电流,使得推杆收缩,通过右侧三角板 带动连杆向下运动,从而将轮毂反方向翻转一定角度并向外扩张一定距离以适应 楼梯的高度和宽度。
行走时:上侧电机通过皮带带动右侧轮毂及三角板一起旋转,从而使得机器 人向前运动
路径规划原理
A算法是一种启发式搜索算法,通过从(cóng)起(qǐ)点开始扩展邻域节点,比较节点的代价值,选择代价最小的节点继续扩展,直到找到目标点,从而避开障碍物,找到最佳路径。传统的A算法存在节点过多、路径冗余以及不够平滑等问题,这不仅影响机器人的稳定性,还降低了路径规划的效率。我们做了以下优化。
1、传统的 A-star算法只考虑了距离问题,没有考虑环境地图上的许多实际因 素。因此 我们在传统 A*算法评价(jià)函(hán)数(shù)的(de)基(jī)础(chǔ)上(shàng),通(tōng)过(guò)引(yǐn)入(rù)节(jié)点(diǎn)到(dào)起始点和目标 点连线的夹角,对评价函数进行改进。
2、引入双向搜索策略。在大规模搜索空间下,传统的 A*算法采用的单向搜索策略存在搜索效率低 搜索节点数量多等问题。
当计算出的中间点位于障碍物内部时,无法有效搜索到起点和目标点,因此需要选择新的中间点。具体步骤如下:
- 确定中间点的位置。
- 在中间点处绘制一条水平线和一条竖直线。
- 计算水平线和竖直线穿越障碍物的跨越长度。
- 选择跨越长度较长的方向,并找出最早穿越障碍物的点。
- 将最早穿越障碍物的点作为优化后的中间点。
3、去除冗余节点,在路径规划中,冗余节点可能导致内存占用过多和频繁调整机器人运动。为了解决这个问题,我们采用了一种路径优化方法来去除冗余节点。具体步骤如下:
- 将起始点作为开始节点。
- 沿路径预定方向逐(zhú)一(yī)连(lián)接(jiē)起(qǐ)始(shǐ)点(diǎn)与(yǔ)路径中(zhōng)的(de)各(gè)个(gè)节(jié)点(diǎn)。
- 如(rú)果(guǒ)连(lián)接(jiē)线(xiàn)段(duàn)与(yǔ)障(zhàng)碍(ài)物(wù)相(xiāng)交(jiāo),保(bǎo)留(liú)相(xiāng)交(jiāo)节(jié)点(diǎn)的(de)前(qián)一(yī)个(gè)节(jié)点(diǎn),移(yí)除(chú)与(yǔ)该(gāi)节(jié)点(diǎn)之(zhī)间(jiān)的(de)所(suǒ)有(yǒu)节(jié)点(diǎn),并(bìng)继(jì)续(xù)连(lián)接(jiē)后(hòu)续(xù)节(jié)点(diǎn)。
- 如(rú)果(guǒ)连(lián)接(jiē)线(xiàn)段(duàn)不(bù)与(yǔ)障(zhàng)碍(ài)物(wù)相(xiāng)交(jiāo),直(zhí)到(dào)目(mù)标(biāo)点(diǎn),保(bǎo)留(liú)目(mù)标(biāo)点(diǎn)并移除起始点与目标点之间的节点。
- 将保留的节点依次连接,形成优化后的路径。
人机交互部分
本项目的人机交互部分包括视觉识别和语音识别。首先,通过OCR技术(shù)识别配送单据(jù)并(bìng)提(tí)取信息,再利用NLP技术获取最终配送地址。也可以通过语音指令下单,语音识别技术将语音转为文本,NLP技术提取出地址信息,并通过语音合成技术将地址反馈给操作员确认。
四、硬件系统设计 :
4.1硬件选型
4.1.1 RoboMaster M2006本作品中,电机采用 RoboMaster M2006直流无刷电机,其作用主要是控制 机器人的移动,控制机器人运动到达指定位置并实时反馈运动状态信息。 RoboMaster M2006使用C610电调进行驱动,使用CAN通信协议发送接收数据, 电机内置位置传感器,实时反馈转子机械角度、转速和转矩等信息。
4.1.2电动推杆 在本作品中,一个变形轮需要两个电动推杆,电动推杆又有两种状态——伸 出(chū)和(hé)缩(suō)回(huí)。一(yī)根(gēn)推(tuī)杆(gān)的(de)伸(shēn)缩(suō)控(kòng)制(zhì)变(biàn)形轮的变大程度,另一根推杆的伸缩控制变形 轮的旋转角度。作用是通过推杆的伸缩使轮子达到特定的扩大程度和旋转角度。
4.1.3 TFT-LCD触摸屏 在本作品中,LCD触摸屏的主要作用是显示经 RDK X3 分析处理后的配送 地址,取件码等信息。本作品采用的是正点原子 2.8寸的 TFTLCD液晶屏。
4.3硬(yìng)件(jiàn)电(diàn)路设(shè)计(jì)
本(běn)系(xì)统(tǒng)的(de)硬(yìng)件(jiàn)连(lián)接(jiē)方(fāng)式(shì)如(rú)下(xià):树(shù)莓(méi)派(pài)负(fù)责(zé)读(dú)取(qǔ)相(xiāng)机(jī)图(tú)像(xiàng)数(shù)据(jù)和(hé)地(de)图(tú)建(jiàn)模(mó),并(bìng)将(jiāng)里(lǐ)程(chéng)计(jì)数(shù)据(jù)发(fā)送(sòng)给(gěi)STM32来(lái)控(kòng)制(zhì)机(jī)器(qì)人(rén)移(yí)动(dòng)。RDK X3主要(yào)处(chù)理(lǐ)语(yǔ)音(yīn)交(jiāo)互(hù)和(hé)视(shì)觉(jué)识(shi)别(bié),并(bìng)在(zài)屏(píng)幕(mù)和(hé)触(chù)摸(mō)屏(píng)上(shàng)显(xiǎn)示结果。STM32控制机器人的底盘运动,通过CAN总线控制电机转动,通过PWM波控制电动推杆的伸缩,并与树莓派实时通信,反馈机器人运动状态信息。
五、软件设计与流程
5.1建图与规划流程
SLAM建图使用三种地图:点云图、栅格图和八叉树地图。虽然激光雷达只能在二维场景中建图,但它具有较高精度和更远的建图范围,且受外界环境影响较小。路径规划中采用2D占用栅格图模式。激光雷达提供精确的二维信息,而深度相机提供(gōng)三(sān)维(wéi)信(xìn)息(xi)。为(wèi)了提高地图精度,本设计结合了激光雷达和RGBD相机的信息来建立栅格图,使用激光雷达和深度相机的融合数据,生成2D栅格地图,并与Cartgrapher算法建立的地图融合,得到最终的综合地图。
5.2人机交互流程 本项目的人机交互过程如图所示,通过视觉或语音方式识别出最终配送地点 并传输给树莓派作为最终导航地点。
5.3底盘控制软件流程 在本作品中,底盘控制采用 STM32单片机作为主控芯片,其程序结构图如 图所示。当机器人在运动的过程中,会不断检测前方是否有楼梯,没有检测到楼 梯,变形轮不变形维持原状;当检测到楼梯,根据测量的楼梯尺寸,STM32控制 变形轮变形到特定的扩大程度和旋转角度后,开始爬楼。
六、系统测试
6.1机械结构测试
验证机械结构可行性、操作稳定性及功能完备性。测试确认:
变形轮通过电动推杆伸缩实现轮毂角度与扩(kuò)张(zhāng)距(jù)离(lí)调(diào)节(jié),满(mǎn)足(zú)楼(lóu)梯(tī)尺(chǐ)寸(cùn)自(zì)适(shì)应(yīng)需(xū)求(qiú)。
结(jié)构(gòu)设(shè)计合理,通过仿真与实(shí)际(jì)测(cè)试(shì)验(yàn)证(zhèng),可(kě)稳定完成爬楼与行走模式切换。
6.2目标检测测试
流程与结果:
数(shù)据(jù)集构(gòu)建(jiàn):采集图像并标注,转换为YOLOv5s适配格式(图(tú)片(piàn)+txt)。
模(mó)型训练:基于YOLOv5s,训练后输出评估指标:
- Precision: 0.6086
- Recall: 0.5641
- mAP@0.5: 0.5703
- mAP@0.5:0.95: 0.3221
实测效果:成功检测目标,满足基础需求,但精度待优化。
6.3底盘控制测试
电动推杆:PWM控制精度达标,可精准调节变形轮扩张与角度。
里程计:STM32实时读取速度、加速度、位置信息,误差<5%。
结论:底盘控制稳定,满足多模式运动需求。
6.4 SLAM建(jiàn)图(tú)测(cè)试(shì)
方(fāng)法(fǎ)对(duì)比(bǐ):
激(jī)光(guāng)雷(léi)达(dá):建(jiàn)图(tú)范(fàn)围(wéi)广(guǎng),但(dàn)易(yì)受(shòu)环(huán)境(jìng)缝(fèng)隙(xì)干(gàn)扰(rǎo)。
RGBD相(xiāng)机(jī):受(shòu)光(guāng)照(zhào)影(yǐng)响(xiǎng),边(biān)界(jiè)模(mó)糊(hu)。
融(róng)合(hé)方(fāng)案(àn):激(jī)光(guāng)雷(léi)达(dá)+RGBD投(tóu)影(yǐng)融(róng)合(hé),生(shēng)成(chéng)高(gāo)精(jīng)度(dù)2D栅(zhà)格(gé)地(de)图(tú),消(xiāo)除(chú)缝(fèng)隙(xì)干(gàn)扰(rǎo),边(biān)界(jiè)清(qīng)晰(xī)。
6.5路径规划测试
改进A*算法(对比传统A*):
搜索节点数减少30%,路径长度缩短15%,规划时间降低25%。
冗余节点去除后,路径平滑度提升,内存占用减少20%。
6.6人(rén)机(jī)交(jiāo)互(hù)测(cè)试(shì)
OCR+NLP:成(chéng)功(gōng)从(cóng)虚(xū)拟(nǐ)配(pèi)送(sòng)单(dān)提(tí)取(qǔ)地(de)址(zhǐ),准(zhǔn)确(què)率(lǜ)>85%。
ASR+NLP:语(yǔ)音(yīn)指(zhǐ)令(lìng)中(zhōng)地(de)址(zhǐ)抽(chōu)取(qǔ)准(zhǔn)确(què)率(lǜ)>80%,支(zhī)持(chí)模(mó)糊(hu)语(yǔ)义(yì)(如(rú)“送(sòng)到(dào)三(sān)号(hào)楼(lóu)二(èr)层(céng)”)。
语(yǔ)音(yīn)反(fǎn)馈(kuì):合(hé)成(chéng)语(yǔ)音(yīn)播(bō)报(bào)任(rèn)务(wu)信(xìn)息(xi),用(yòng)户可确认指令正确性。
关键结论
- 各模块功能均通过测试,满足跨楼层配送需求。
- 目标检测与路径规划精(jīng)度(dù)待(dài)优(yōu)化(huà),可(kě)通(tōng)过(guò)扩(kuò)展(zhǎn)数(shù)据(jù)集与(yǔ)算(suàn)法(fǎ)调(diào)参(cān)进(jìn)一(yī)步(bù)提(tí)升(shēng)。
相关新闻







联系我们
地址:山东省济南市槐荫区兴福街道齐鲁大道3189号西进时代中心
电话:15898523365
传真:15898523365
邮箱:service@Kaiyun.cco
网址:http://www.rjptj.com

