






14
2025
-
03
中科本原推出面向人形机器人的关节电机解决方案
浏览:484
发布:2025-03-14 13:00:26
在(zài)人(rén)工(gōng)智(zhì)能(néng)与(yǔ)高(gāo)端(duān)制(zhì)造(zào)的(de)浪(làng)潮(cháo)中(zhōng),人(rén)形(xíng)机(jī)器(qì)人(rén)正(zhèng)从(cóng)科(kē)幻(huàn)想(xiǎng)象(xiàng)加(jiā)速(sù)迈(mài)向(xiàng)现(xiàn)实(shí)。从(cóng)特(tè)斯(sī)拉(lā)Optimus的(de)工(gōng)厂(chǎng)分(fēn)拣(jiǎn)到(dào)优(yōu)必(bì)选(xuǎn)Walker的(de)养(yǎng)老(lǎo)陪(péi)护(hù),人(rén)形(xíng)机(jī)器(qì)人(rén)凭(píng)借(jiè)类(lèi)人(rén)形(xíng)态(tài)与(yǔ)智(zhì)能(néng)交(jiāo)互(hù)能(néng)力(lì),正(zhèng)在(zài)工(gōng)业(yè)、医(yī)疗(liáo)、家(jiā)庭(tíng)服(fú)务(wu)等(děng)领(lǐng)域掀(xiān)起(qǐ)革(gé)命(mìng)。而(ér)这(zhè)一(yī)变(biàn)革(gé)的(de)核(hé)心(xīn)驱(qū)动(dòng)力(lì),正(zhèng)藏(cáng)匿(nì)于(yú)机(jī)器(qì)人(rén)的(de)“运(yùn)动(dòng)心(xīn)脏(zàng)”——关节(jié)电(diàn)机(jī)。
人(rén)形(xíng)机(jī)器(qì)人(rén)新(xīn)浪(làng)潮(cháo):开(kāi)启(qǐ)智(zhì)慧(huì)新(xīn)时(shí)代(dài)
高(gāo)盛(shèng)研(yán)究(jiū)部(bù)指(zhǐ)出(chū),全球(qiú)人(rén)形(xíng)机(jī)器(qì)人(rén)产(chǎn)业(yè)正(zhèng)加(jiā)速(sù)迈(mài)向(xiàng)全方(fāng)位(wèi)生(shēng)态(tài)系(xì)统(tǒng)的(de)成(chéng)熟(shú)。在(zài)基(jī)本(běn)情(qíng)景(jǐng)假(jiǎ)设(shè)下(xià),迅(xùn)速(sù)增(zēng)长(zhǎng)的(de)市(shì)场(chǎng)需(xū)求(qiú)预(yù)计(jì)到(dào)2035年(nián)将(jiāng)释(shì)放(fàng)高(gāo)达(dá)380亿(yì)美(měi)元(yuán)的(de)潜(qián)在(zài)市(shì)场(chǎng)空(kōng)间(jiān)。此(cǐ)外(wài),鉴(jiàn)于(yú)人(rén)形(xíng)机(jī)器(qì)人(rén)仍(réng)处(chù)于(yú)早(zǎo)期(qī)发(fā)展(zhǎn)阶(jiē)段(duàn),并(bìng)存(cún)多(duō)种(zhǒng)技(jì)术(shù)路径,高(gāo)盛(shèng)预(yù)测(cè)行(xíng)业(yè)竞(jìng)争(zhēng)格(gé)局(jú)将(jiāng)持(chí)续(xù)演(yǎn)进(jìn),不(bù)断(duàn)推(tuī)动(dòng)技(jì)术(shù)创(chuàng)新(xīn)与(yǔ)产(chǎn)业(yè)升(shēng)级(jí)。
工(gōng)信(xìn)部(bù)印(yìn)发(fā)《人(rén)形(xíng)机(jī)器(qì)人(rén)创(chuàng)新(xīn)发(fā)展(zhǎn)指(zhǐ)导(dǎo)意(yì)见(jiàn)》,明(míng)确(què)指(zhǐ)出(chū),人(rén)形(xíng)机(jī)器(qì)人(rén)有(yǒu)望(wàng)成(chéng)为(wèi)继(jì)计(jì)算(suàn)机(jī)、智(zhì)能(néng)手(shǒu)机(jī)、新(xīn)能(néng)源(yuán)汽(qì)车(chē)后(hòu)的(de)颠(diān)覆(fù)性(xìng)产(chǎn)品(pǐn)。到(dào) 2025 年(nián),人(rén)形(xíng)机(jī)器(qì)人(rén)创(chuàng)新(xīn)体(tǐ)系(xì)初(chū)步(bù)建(jiàn)立(lì),“大(dà)脑(nǎo)、小(xiǎo)脑(nǎo)、肢(zhī)体(tǐ)”等(děng)一(yī)批(pī)关键技(jì)术(shù)取(qǔ)得(de)突(tū)破(pò),确(què)保(bǎo)核(hé)心(xīn)部(bù)组(zǔ)件(jiàn)安(ān)全有(yǒu)效(xiào)供(gōng)给(gěi)。到(dào) 2027 年(nián),人(rén)形(xíng)机(jī)器(qì)人(rén)技(jì)术(shù)创(chuàng)新(xīn)能(néng)力(lì)显(xiǎn)著(zhe)提(tí)升(shēng),形(xíng)成(chéng)安(ān)全可(kě)靠(kào)的(de)产(chǎn)业(yè)链(liàn)供(gōng)应(yīng)链(liàn)体(tǐ)系(xì),构(gòu)建(jiàn)具(jù)有(yǒu)国(guó)际(jì)竞(jìng)争(zhēng)力(lì)的(de)产(chǎn)业(yè)生(shēng)态(tài),综(zōng)合(hé)实(shí)力(lì)达(dá)到(dào)世(shì)界(jiè)先(xiān)进(jìn)水(shuǐ)平(píng)。
关节(jié)电(diàn)机(jī):赋(fù)予(yǔ)人(rén)形(xíng)机(jī)器(qì)人(rén)生(shēng)命(mìng)之(zhī)动(dòng)
在(zài)人(rén)形(xíng)机(jī)器(qì)人(rén)系(xì)统(tǒng)中(zhōng),关节(jié)电(diàn)机(jī)承(chéng)担(dān)着(zhe)至(zhì)关重(zhòng)要(yào)的(de)作(zuò)用(yòng),是(shì)实(shí)现(xiàn)机(jī)器(qì)人(rén)灵(líng)活(huó)运(yùn)动(dòng)和(hé)高(gāo)精(jīng)度(dù)操(cāo)控(kòng)的(de)核(hé)心(xīn)驱(qū)动(dòng)单(dān)元(yuán)。作(zuò)为(wèi)“智(zhì)能(néng)关节(jié)”,关节(jié)电(diàn)机(jī)直(zhí)接(jiē)决(jué)定(dìng)了(le)机(jī)器(qì)人(rén)关节(jié)的(de)运(yùn)动(dòng)性(xìng)能(néng)、能(néng)效(xiào)水(shuǐ)平(píng)以(yǐ)及(jí)整(zhěng)体(tǐ)协(xié)作(zuò)能(néng)力(lì),其(qí)技(jì)术(shù)水(shuǐ)平(píng)直(zhí)接(jiē)影(yǐng)响(xiǎng)人(rén)形(xíng)机(jī)器(qì)人(rén)的(de)应(yīng)用(yòng)广(guǎng)度(dù)和(hé)发(fā)展(zhǎn)前(qián)景(jǐng)。
宇(yǔ)树(shù)旗(qí)下(xià)的(de)G1通(tōng)用(yòng)人(rén)形(xíng)机(jī)器(qì)人(rén),可(kě)实(shí)现(xiàn)720度(dù)回(huí)旋(xuán)踢(tī)和(hé)多(duō)种(zhǒng)武(wǔ)打(dǎ)动(dòng)作(zuò)。G1机(jī)器(qì)人(rén)单(dān)腿(tuǐ)自(zì)由(yóu)度(dù)为(wèi)6,单(dān)手(shǒu)臂(bì)的(de)自(zì)由(yóu)度(dù)为(wèi)5,单(dān)手(shǒu)自(zì)由(yóu)度(dù)为(wèi)7,可(kě)选(xuǎn)手(shǒu)腕(wàn)自(zì)由(yóu)度(dù)为(wèi)2,共(gòng)用(yòng)23-43个(gè)关节(jié)电(diàn)机(jī)模(mó)组(zǔ)。
云(yún)深(shēn)处(chù)旗(qí)下(xià)山(shān)猫(māo)全地(de)形(xíng)机(jī)器(qì)人(rén)在(zài)传(chuán)承(chéng)云(yún)深(shēn)处(chù)在(zài)具(jù)身(shēn)智(zhì)能(néng)方(fāng)面(miàn)的(de)技(jì)术(shù)积(jī)累(lèi)的(de)同(tóng)时(shí),基(jī)于(yú)"山(shān)猫(māo)"的(de)形(xíng)态(tài)针(zhēn)对(duì)性(xìng)进(jìn)行(xíng)特(tè)色(sè)化(huà)适(shì)配(pèi),在(zài)特(tè)殊(shū)地(de)形下表现优异,如楼梯、斜坡、石板路、碎石路穿越。山猫全地形机器人共用12个关节电机模组。
中科本原推出面向人形机器人的关节电机解决方案
BenYuan关节电机采用了一体化设计方式,包含了无框力矩电机、行星减(jiǎn)速(sù)器(qì)、驱(qū)动(dòng)器(qì)、编(biān)码(mǎ)器(qì)、铝(lǚ)合(hé)金(jīn)传(chuán)动(dòng)件(jiàn)及(jí)外(wài)壳(ké)。电(diàn)机(jī)整(zhěng)体(tǐ)重(zhòng)量(liàng)为(wèi)378g,尺(chǐ)寸(cùn)为(wèi)Ø80*40。
电(diàn)机(jī)参(cān)数(shù)
BenYuan关节(jié)电(diàn)机(jī)额(é)定(dìng)扭(niǔ)矩(ju)为(wèi)5N·m,峰(fēng)值(zhí)扭(niǔ)矩(ju)为(wèi)11N·m,提(tí)供(gōng)了(le)更(gèng)强(qiáng)大(dà)的(de)承(chéng)载(zài)能(néng)力(lì)和(hé)更(gèng)迅(xùn)速(sù)的(de)动(dòng)态(tài)响(xiǎng)应(yīng)。额(é)定(dìng)转速120rpm与最大转速420rpm提高了机器人运动的灵活性。此外,板载编码器精度达到了16bit,提高了关节角度控制的精准度。更多参数详情见下表1。这些参数共同作用,使关节电机能够满足不同应用场景需求,为人形机器人提供更自然、更高效的运动能力,助力其在工业、医疗、服务等领域实现广泛应用。
| 额定电压 | 24 VDC |
| 额定电流 | 10.5A |
| 额定转速 | 120 rpm±10% |
| 额定扭矩 | 5 N.m |
| 相间电阻 | 0.48Ω±10% |
| 扭矩常数 | 0.47N.M/A |
| 重量 | 378g±3g |
| 减速比 | 8:1 |
| CAN通信波特率 | 1Mbps |
| 使用温度范围 | -20~50℃ |
| 使用湿度范围 | 5~85%,无凝露 |
表1 FDM关节电机参数详情
驱动板介绍
关节电机驱动板是连接控(kòng)制(zhì)系(xì)统(tǒng)与(yǔ)电(diàn)机(jī)的(de)关键部(bù)件(jiàn),负(fù)责(zé)接(jiē)收(shōu)控(kòng)制(zhì)信(xìn)号(hào)、驱(qū)动(dòng)电(diàn)机(jī)运(yùn)转(zhuǎn),并(bìng)实(shí)现(xiàn)精(jīng)准(zhǔn)的(de)扭(niǔ)矩(ju)、速(sù)度(dù)和(hé)位(wèi)置(zhì)控(kòng)制(zhì)。作(zuò)为(wèi)人(rén)形(xíng)机器人关节电机的核心驱动模块,其性能直接影响机器人(rén)的(de)运(yùn)动(dòng)流(liú)畅(chàng)度(dù)、响应速度和能耗效率。
BenYuan关节电机内部集成了一款自研的关节电机驱动板。驱动板以FDM320R035高性能数字信号处理器为核心,搭建了一套高效电机驱动方案,能够实现稳定的电机控制。该驱动板专为高精度伺服系统设计,具备强大的计算能力、精准的电流采样与驱动能力,为人形机器人等高端应用提供可靠的动力支持。
核心控制单元采用FDM320R035,具备强大的数据处理能力,能够高速执行磁场定向控制(FOC)算法,实现电机的高精度扭矩、速度和位置控制。其高速运算能力确保机器人关节运动平稳流畅,提高动态响应速度和能效。整体控制框架见图5。
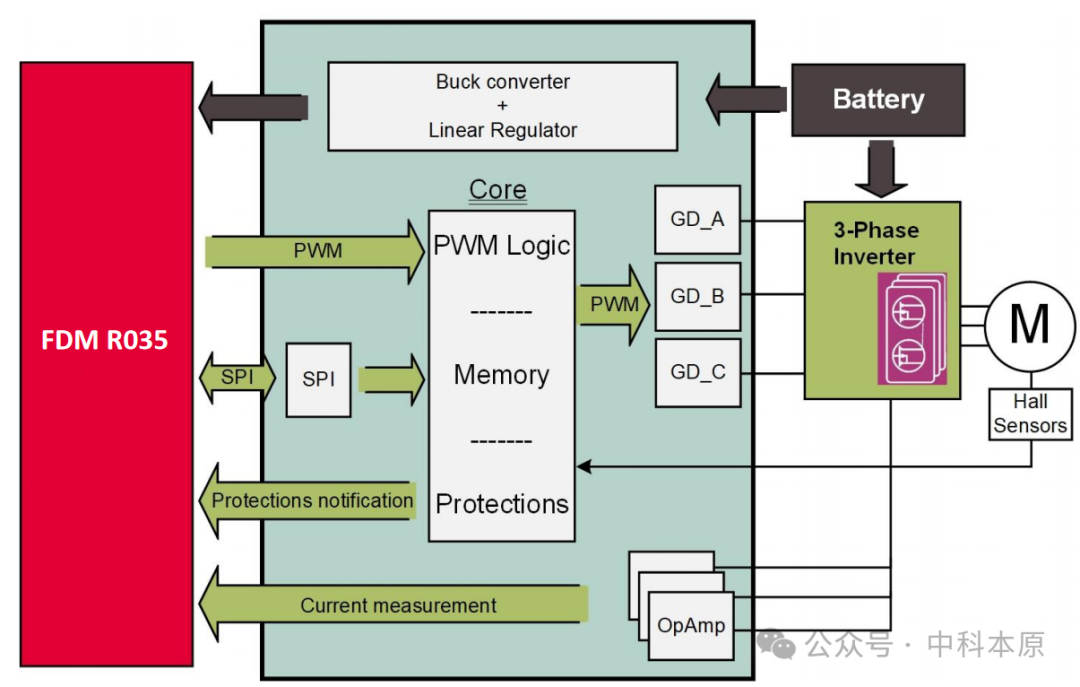
图5 FDM关节电机驱动器框架 该关节电机驱动器板卡如图6所示:
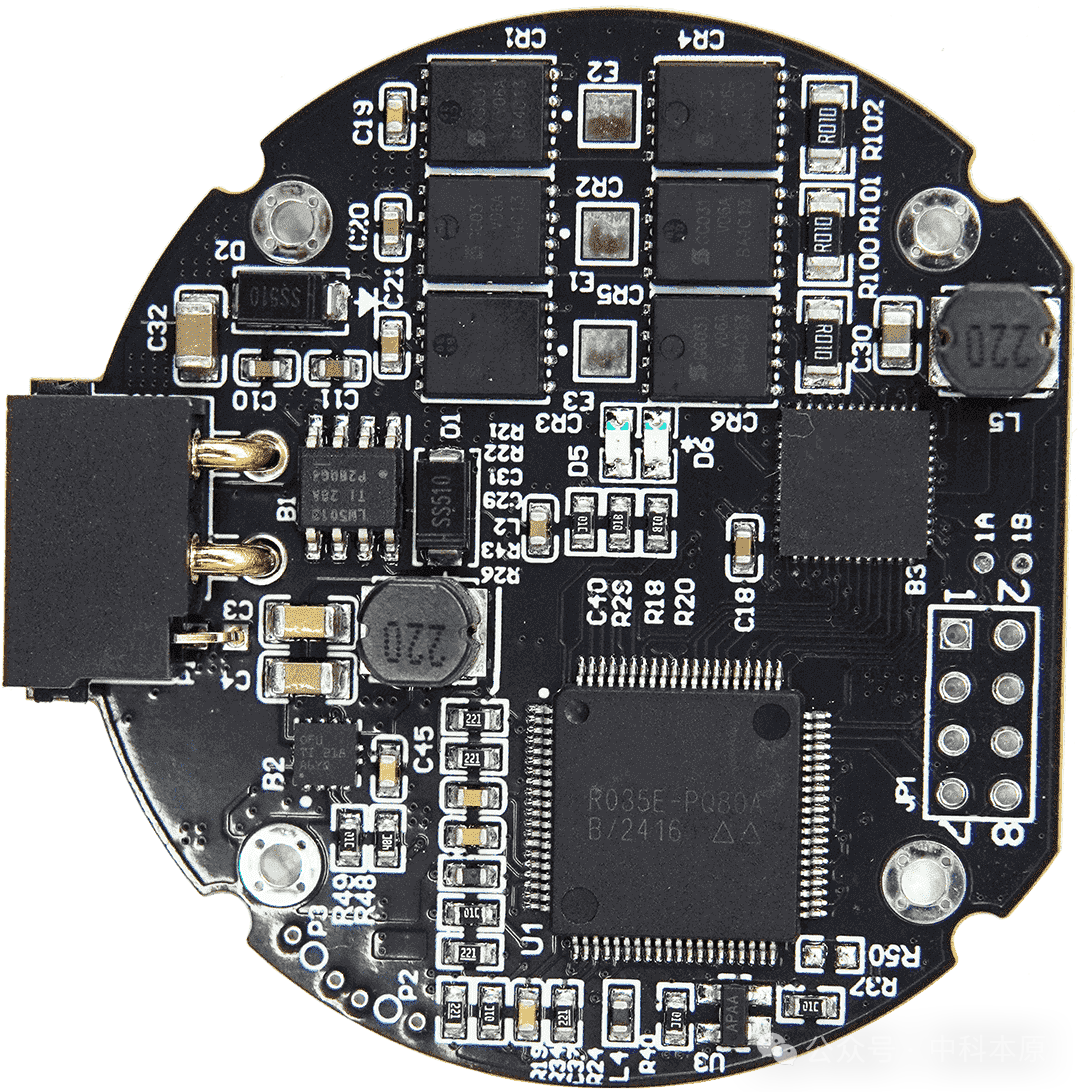
图6FDM关节电机驱动器板卡
驱动算法介绍
在机器人关节控制中,传统的位置控制能够实现精准的轨迹跟踪,但在涉及人机交互、复杂环境适应、精密装配等应用时,仅靠位置控制难以满足柔性、安全和适应性的需求。因此,BenYuan关节电机采用了基于FOC的力位混合控制,用于平衡刚性控制与柔性控制的需求。
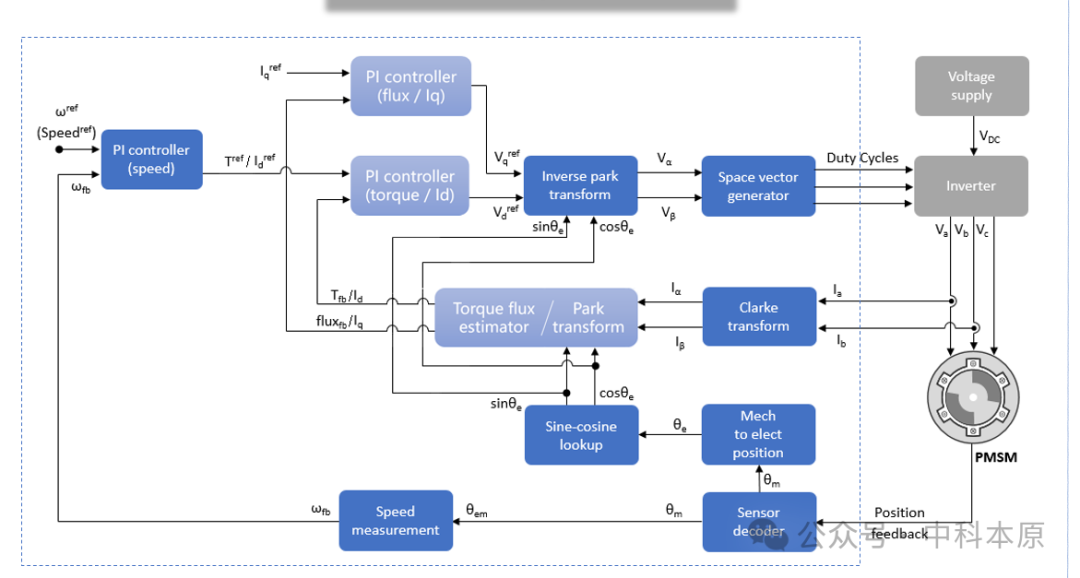
图7 控制算法框图
核心思想是通过数学变换,将三相电流转换为直流分量,随后使用PD控制器将电机在位置上的偏差反馈到力矩输出上,实现更精确的扭矩、速度和位置控制,同时提高效率并减少能耗。
BenYuan关节电机包含以下 5 个控制指令:
1)前馈力矩:
2)目标角度位置:
3)目标角速度:
4)位置刚度:
5)速度刚度:
在力位混合控制中,使用PD控制器将电机在输出位置的偏差反馈到力矩输出上:
公式中,为关节电机的电机转子输出力矩;为当前电机转子的角度位置;为当前电机转子的角速度。
除算法外,我们还提供简单易用的上位机和丰富的API以方便用户调试和进行系统集成调用。
总之,我们提供了从芯片、关节电机驱动器和算法的完整解决方案,为用户的机器人产品开发提供全方位服务。
关节电机演示
以下是关节电机的正弦自动化测试:
从工厂到家庭:关节电机驱动智能未来
随着机器人技术的发展,关节电机作为核心(xīn)驱(qū)动(dòng)部件,正推动人形机器人从工业场景走向更广阔的(de)应(yīng)用空间。无论是在智能制造、医疗康复、物流搬运,还是未来的家庭服务、教育陪伴领域,先进的关节电机都在赋予机器人更高的灵活性、精准性和智能性,为人类社会带来深远变革。在工业领域,BenYuan关节电机可广泛应用于智能工厂。传统工业机器人多采用刚性传动,而BenYuan关节(jié)电(diàn)机结合力控和位置控制技术,使机器人能在复杂环境中柔顺作业,适应柔性制造的需求。此外,高扭矩密度和精准控制能力的特点,使得BenYuan关节电机能处理更精细的操作,例如电子元件装配、汽车制造等高要求场景。
然而,BenYuan关节电机的应用并不止步于工厂。随着人形机(jī)器(qì)人正加速进入家庭场景,成为未来智能助手。家用机器人需要在复杂环境中自主移动、执行多任务操作,如协助家务、照顾老人、陪伴儿童等。相比传统电机,本原关节电机具备更轻量化、更高效的特性,使家庭机器人拥有接近人类的自然动作能力。例如,BenYuan关节电机可实现机器人轻松完成精细抓取,安全地与人互动,而不会造成误伤。
在医疗康复领域,外骨骼机器人和康复机器人依赖关节电机提供稳定的辅助力,帮助患者进行康复训练或增强行动能力。高精度的力矩控制和响应速度,使这些机器人能够适应不同患者的需求,提供更个性化、更安全的康复体验。
从工厂的高效生产到家庭的智能陪伴,关节电机正在驱动人形机器人从工业向生活延伸,塑造未来的智能世界。随着技术不断突破,机器人(rén)将(jiāng)更(gèng)加(jiā)灵(líng)活(huó)、智(zhì)能(néng)、安(ān)全,让(ràng)智(zhì)能(néng)生(shēng)活(huó)真(zhēn)正(zhèng)走(zǒu)进(jìn)千(qiān)家(jiā)万(wàn)户(hù)。
相关新闻







联系我们
地址:山东省济南市槐荫区兴福街道齐鲁大道3189号西进时代中心
电话:15898523365
传真:15898523365
邮箱:service@Kaiyun.cco
网址:http://www.rjptj.com

