






21
2025
-
03
江苏多维科技推出用于机器人关节的基于TMR磁阻芯片的磁编码器方案
浏览:471
发布:2025-03-21 02:30:31
小(xiǎo)尺(chǐ)寸(cùn),低(dī)成(chéng)本(běn),高(gāo)精(jīng)度(dù)
对(duì)轴(zhóu)&离(lí)轴(zhóu)多(duō)种(zhǒng)组(zǔ)合(hé),高(gāo)柔(róu)韧(rèn)性(xìng)
2025年(nián)3月(yuè)13日(rì)消(xiāo)息(xi),专(zhuān)注(zhù)于(yú) AMR(各(gè)向(xiàng)异(yì)性(xìng)磁(cí)阻(zǔ))和(hé) TMR(隧(suì)道(dào)磁(cí)阻(zǔ))技(jì)术(shù)的(de)磁(cí)传(chuán)感(gǎn)器(qì)制(zhì)造(zào)商(shāng)江(jiāng)苏(sū)多(duō)维(wéi)科(kē)技(jì)有(yǒu)限(xiàn)公(gōng)司(sī) (MultiDimension Technology Co., Ltd.,简(jiǎn)称(chēng)“MDT”) 为(wèi)满(mǎn)足(zú)人(rén)形(xíng)、犬(quǎn)型(xíng)等(děng)机(jī)器(qì)人(rén)关节(jié)的(de)闭(bì)环(huán)控(kòng)制(zhì)要(yào)求(qiú),推(tuī)出(chū)多(duō)种(zhǒng)基(jī)于(yú)TMR磁(cí)阻(zǔ)芯(xīn)片(piàn)的(de)磁(cí)编(biān)码(mǎ)器(qì)方(fāng)案(àn)。方(fāng)案(àn)可(kě)以(yǐ)满(mǎn)足(zú)对(duì)轴(zhóu)和(hé)离(lí)轴(zhóu)多(duō)种(zhǒng)组(zǔ)合(hé)使(shǐ)用(yòng),对(duì)安(ān)装(zhuāng)要(yào)求(qiú)低(dī),具(jù)有(yǒu)小(xiǎo)尺(chǐ)寸(cùn)、低(dī)成(chéng)本(běn)、高(gāo)精(jīng)度(dù)的(de)特(tè)点(diǎn)。 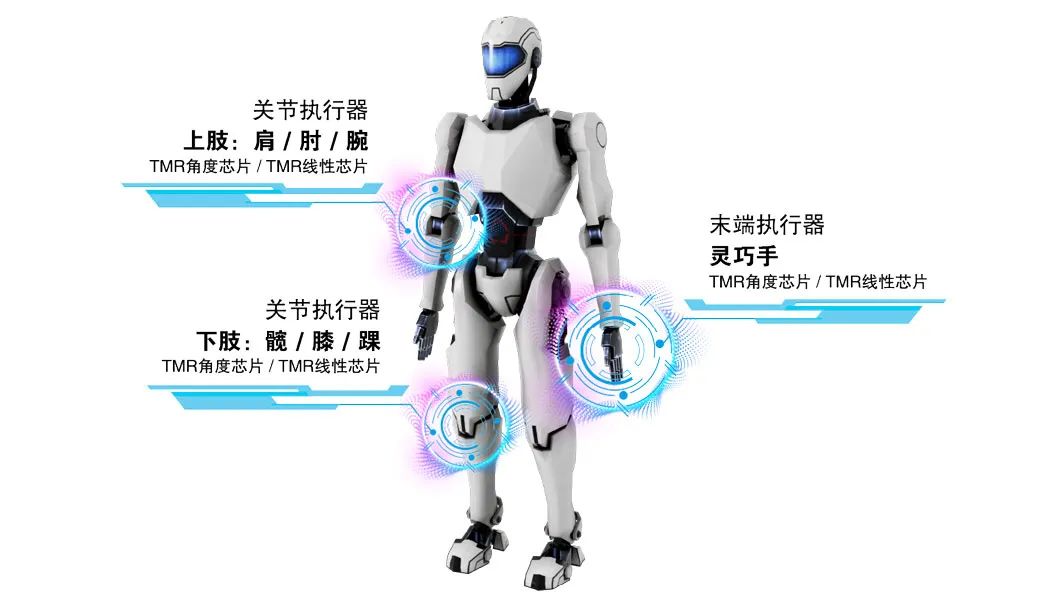
磁(cí)编(biān)码(mǎ)器(qì)方(fāng)案(àn)一(yī)
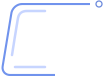
对(duì)轴(zhóu)磁(cí)编(biān)码(mǎ)器(qì)方(fāng)案(àn)常(cháng)规(guī)用(yòng)于(yú)直(zhí)流(liú)电(diàn)机(jī)轴端角度检测,配合单对极充磁磁铁和一颗TMR3110或TMR3111来实现。
TMR3110、TMR3111具有自校准功能,配合单对极充磁磁铁,可以达到0.05°的绝对角度精度,满足40000RPM的转速需求。TMR3110、TMR3111有SPI,ABZ和PWM输出方式,满足客户多种通讯接口需要。
其中,TMR3111D采用DFN10L(3mm × 3mm × 0.75mm)小尺寸封装,能够节约用户的PCBA布板空间。
图1 对轴磁编码器方案原理图
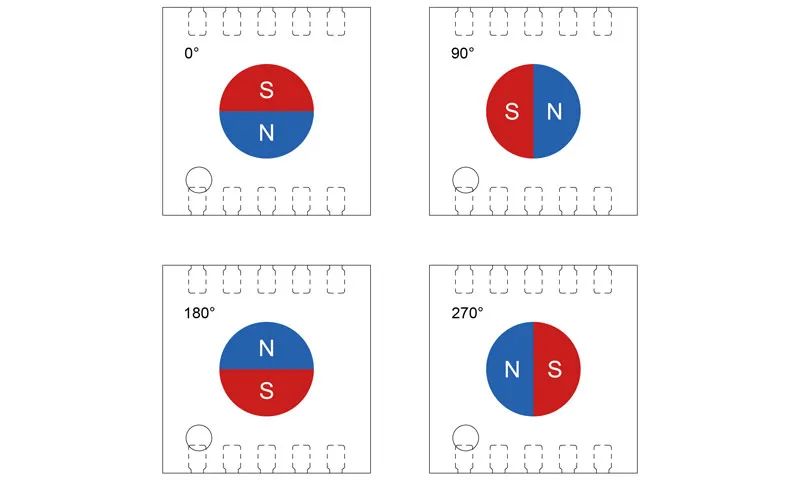
图2 TMR3110所测磁场角度定义(顶视图)
磁编码器方案二

图(tú)3 离(lí)轴(zhóu)磁(cí)编(biān)码(mǎ)器(qì)方(fāng)案(àn)原(yuán)理(lǐ)图(tú)
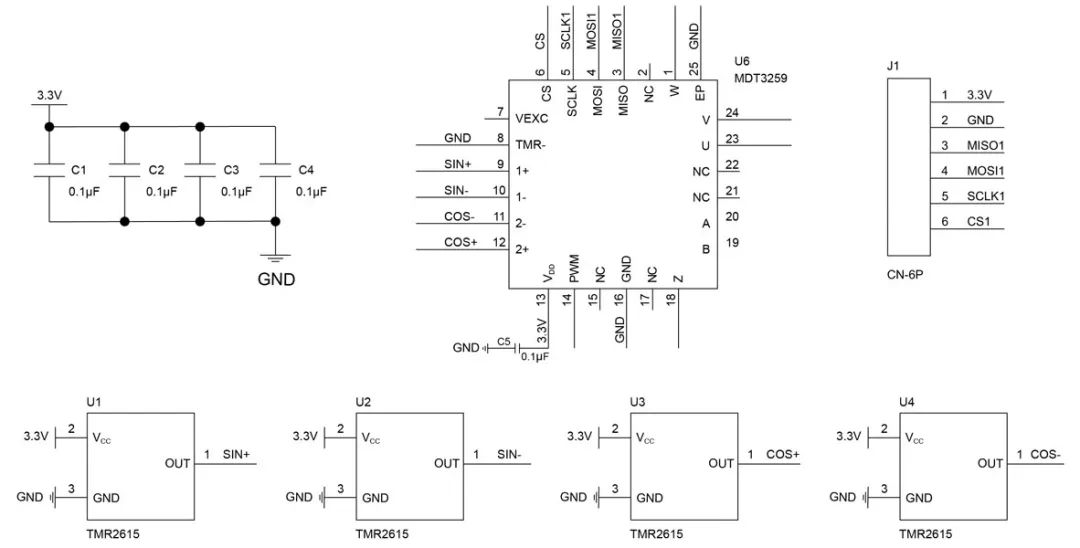
图(tú)4 推(tuī)荐(jiàn)电(diàn)路图(tú)
磁(cí)编(biān)码(mǎ)器(qì)方(fāng)案(àn)三(sān)
三、双对轴TMR3110/3111组合方案
针对直流电机和行星减速器组合的机器人关节方案,双对轴TMR3110/3111组合方案安装简单、成本低,江苏多维科技推出单对级磁铁磁屏蔽方案,可以有效消除输入输出轴端的两颗单对极磁铁相互影响。在组合使用中满足±0.15°的绝对角度精度需求。
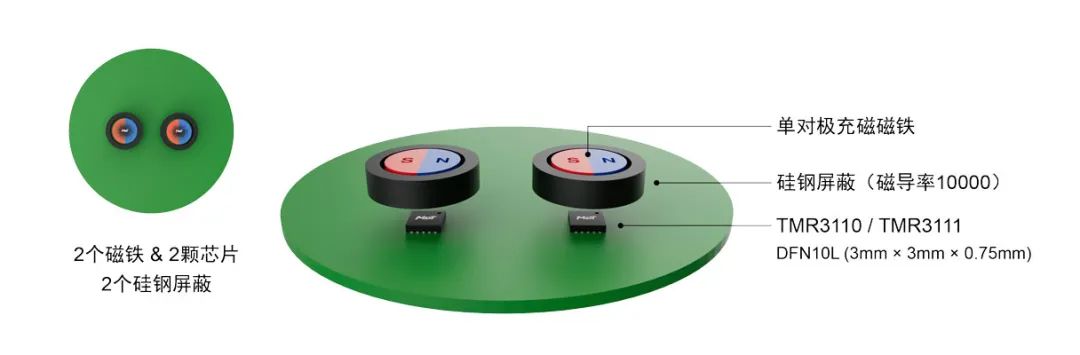
图5 双对轴TMR3110/3111组合方案原理图
磁编码器方案四
针对直流电机和行星减速器的机器人(rén)关节(jié)方(fāng)案(àn),单(dān)对(duì)极(jí)磁(cí)铁(tiě)对轴(TMR311x)+ 单对极磁环离轴(TMR2615×4 + MDT3259组合方案)结构更为简单。通过增加磁屏蔽,可有效消除磁铁和磁环的相互影响。在组合中满足±0.15°的绝对角度精度需求。
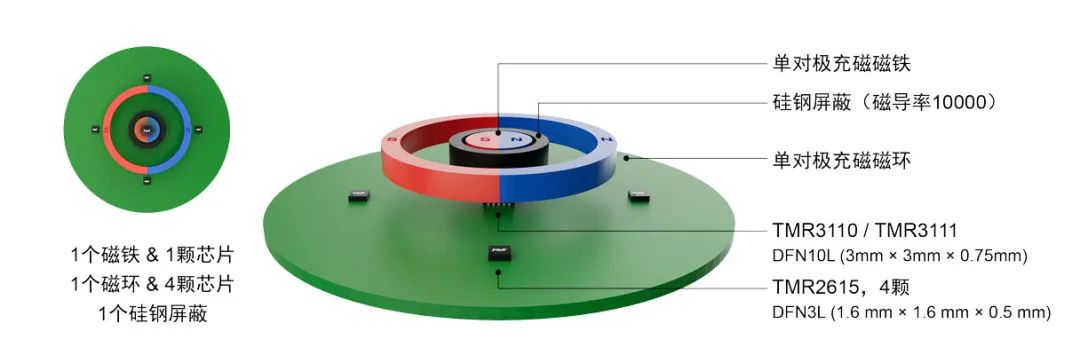
图6 单对极磁铁对轴+单对极磁环离轴组合方案原理图
相关新闻







联系我们
地址:山东省济南市槐荫区兴福街道齐鲁大道3189号西进时代中心
电话:15898523365
传真:15898523365
邮箱:service@Kaiyun.cco
网址:http://www.rjptj.com

