






25
2025
-
03
树莓派+ROS:低成本机器人大脑的超值之选,还是性能瓶颈?真相大揭秘!
浏览:470
发布:2025-03-25 21:00:21
最近,人形机器人在全球范围内引发了巨大的关注,成为科技领域最热门的话题之一。从特斯拉的Optimus到稚晖君的远征A2系列,再到春晚舞台上惊艳亮相的宇树机器人,这些机器人不仅展示了强大的技术实力,更让人们看到了人形机器人未来走进日常生活的可能性。

特斯拉Optimus

远征A2系列
在2025年的春晚舞台上,宇树科技的人形机器人H1凭借其灵活的舞姿和精准的AI互动,成功“出圈”。这些机器人在节目中展示了扭秧歌、转手绢等复杂动作,背后是宇树科技强大的AI驱动全身运动控制技术和360°全景深度感知技术。与此同时,特斯拉的Optimus人形机器人也在全球范围内引发了热议,其展示了高度拟人化的动作和强大的任务执行能力。
宇树机器人
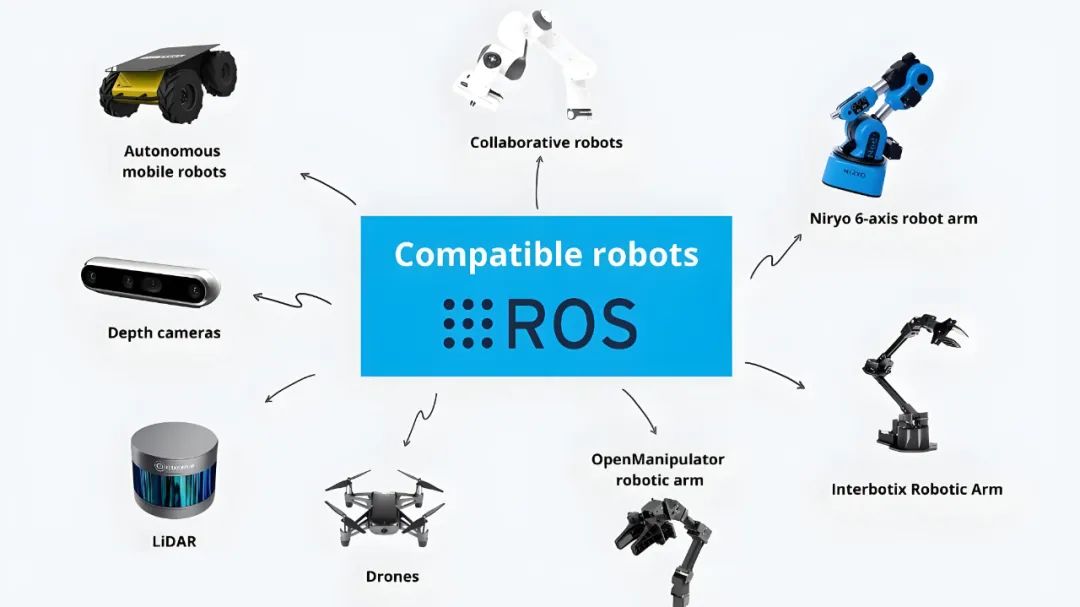
而在这场人形机器人技术的浪潮中,树莓派(Raspberry Pi)与ROS(机器人操作系统)的组合正在成为推动机器人走向大众的重要力量。树莓派凭借其小巧、低成本的特点,成为机器人开发领域的热门硬件平台。它不仅能够运行Linux操作系统,还能通过丰富的接口连接各种传感器和执行器,与ROS无缝对接。这种组合的优势在于其极高的性价比和强大的社区支持,使得更多开发者能够(gòu)轻(qīng)松(sōng)入(rù)门(mén)。
ROS是(shì)什(shén)么(me)?为(wèi)什(shén)么(me)选(xuǎn)择(zé)它(tā)?
ROS(Robot Operating System)并(bìng)非(fēi)传(chuán)统(tǒng)意(yì)义(yì)上(shàng)的(de)操(cāo)作(zuò)系(xì)统(tǒng),而(ér)是(shì)一(yī)个(gè)开(kāi)源(yuán)的(de)机(jī)器(qì)人(rén)软(ruǎn)件(jiàn)框(kuāng)架(jià),用(yòng)于(yú)开(kāi)发、管理和通信机器(qì)人(rén)应(yīng)用(yòng)。它(tā)提(tí)供(gōng)了(le)硬(yìng)件(jiàn)抽(chōu)象(xiàng)、设(shè)备(bèi)驱(qū)动(dòng)、通(tōng)信(xìn)协(xié)议(yì)等(děng)功(gōng)能(néng),使(shǐ)得(de)开(kāi)发(fā)者(zhě)可(kě)以(yǐ)专(zhuān)注(zhù)于(yú)算(suàn)法(fǎ)和(hé)应(yīng)用(yòng)开(kāi)发(fā),而(ér)无(wú)需(xū)深(shēn)入(rù)了(le)解(jiě)硬(yìng)件(jiàn)细(xì)节。此外,ROS的开(kāi)源(yuán)性(xìng)、强(qiáng)大(dà)的(de)社区支持以及广泛的适用性,使其成为机器人开发中的“瑞士军刀”。
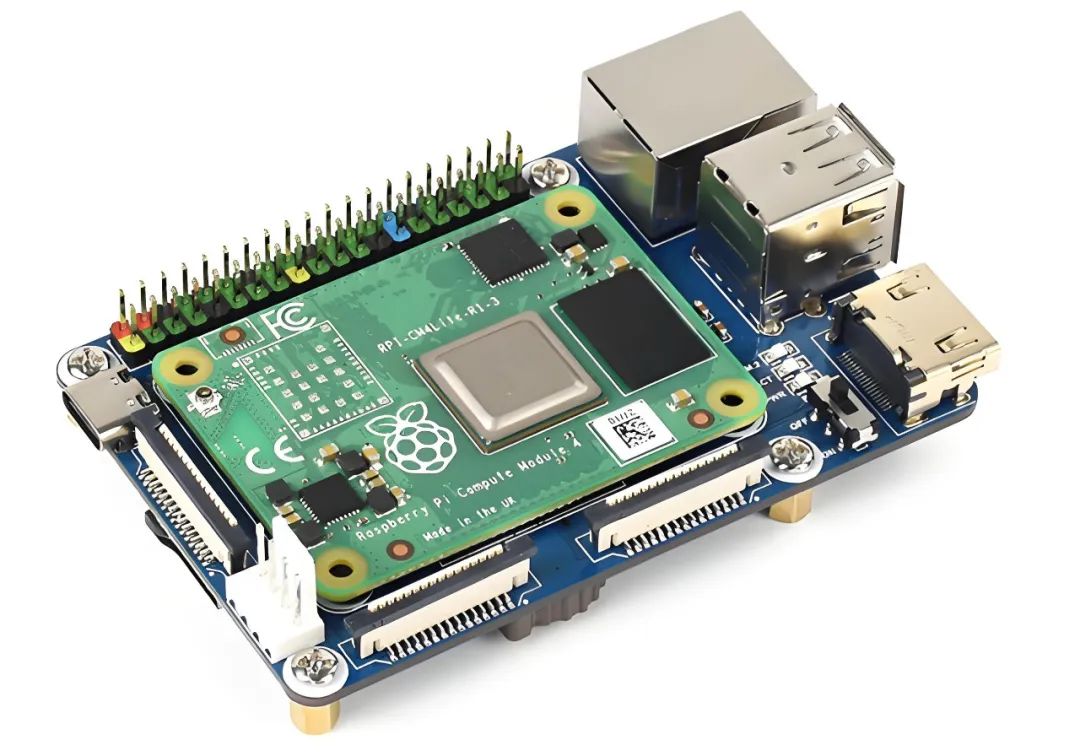
树莓派是什么?它如何与ROS结合?
树莓派是一款小(xiǎo)巧(qiǎo)、低(dī)成(chéng)本(běn)的(de)微(wēi)型(xíng)计(jì)算(suàn)机(jī),支(zhī)持(chí)多(duō)种(zhǒng)操(cāo)作(zuò)系(xì)统(tǒng),包(bāo)括(kuò)Linux。它(tā)拥(yōng)有丰富的接口(如USB、HDMI、GPIO等),可以轻松连接传感器、摄像头、显示器等外设。树莓派与ROS的结合非常自然:树莓派运行Linux系统,而ROS基于Linux开发,两者可以无缝对接。
在(zài)ROS中(zhōng),树(shù)莓(méi)派(pài)可(kě)以(yǐ)作(zuò)为(wèi)主节(jié)点(diǎn)(master node)协(xié)调(diào)其(qí)他(tā)节(jié)点(diǎn)的(de)通(tōng)信(xìn),也(yě)可(kě)以(yǐ)作(zuò)为(wèi)从节点(slave node)执行特定任务。这种灵活性使得树莓派成为ROS开发的理想硬件平台之一。
树莓派用于ROS开发的优点
成本低:树莓派价格亲民,适合预算有限的开发者和教育机构。
便携性强:体积小巧、重量轻,可以轻松安装在机器人上。
功能丰富:树莓派支持多种操作系统和软件包,可以轻松扩展功能。
社区支持强大:树莓派和ROS都拥有庞大的开发者社区,提供丰富的教程和资源。
教育价值高:树莓派的易用性和ROS的强大功能使其成为机器人教育的绝佳工具。
树莓派用于ROS开发的缺点
性能有限:树莓派的计算能力和内存相对较低,难以处理复杂的任务,如图像处理或深度学习。
可靠性问题:树莓派不适合在恶劣环境下使用,可能会因高温、灰尘、湿度或振动而损坏。
安全性不足:树莓派容易受到网络攻击,需要额外的安全措施来保护数据。
SD卡寿命问题:运行ROS时,树莓派的读写操作频繁,可能导致SD卡故障。
如何开始树莓派与ROS的开发之旅?
如果你对树莓派和ROS的开发感兴趣,以下是一些入门建议:
1.选择合适的树莓派型号:建议选择Raspberry Pi 3或更高版本,因为它们的性能更好。
2.安装操作系统:选择支持ROS的Linux发行版,如Ubuntu或Raspbian。
3.安装ROS:根据你的树莓派型号选择合适的ROS版本,并按照官方指南进行安装。
4.连接外设:通过GPIO、USB等接口连接传感器、摄像头等设备。
5.编写和运行代码:使用Python或C++编写ROS节点,并通过ROS命令行工具或IDE运行。
树莓派与ROS的结合为机器人开发带来了无限可能,但它们也并非万能。树莓派的性能瓶颈和可靠性问题需要开发者在项目中权衡(héng)。如果你的项目需要高性能计算,可能需要考虑更强大的硬件平台。但对于初学者、教育项目或轻量级应用,树莓派与ROS的组合无疑是性价比极高的选择。
无论你是机器人开发的新手,还是希望在项目中尝试低成本解决方案的资深开发者,树莓派与ROS的组合都值得你一试。让我们一起探索这个充满可能性的世界吧!
相关新闻







联系我们
地址:山东省济南市槐荫区兴福街道齐鲁大道3189号西进时代中心
电话:15898523365
传真:15898523365
邮箱:service@Kaiyun.cco
网址:http://www.rjptj.com

