






28
2025
-
03
德州仪器先进的电流和电压检测技术助力更精确电机控制 提升机器人精度
浏览:468
发布:2025-03-28 12:00:26
想象一个类人机器人尝试穿针引线,或者一个协作机器人 (cobot) 在食品加工厂中处理易碎品。极轻微的计算错误也会导致它们无法实现目标。
机器人离不开精度。电(diàn)流(liú)和(hé)电(diàn)压(yā)检(jiǎn)测(cè)技(jì)术(shù)的(de)进(jìn)步(bù)可显著提高机器人处理复杂任务的能力,同时加快转矩响应速度,从而实现更平滑的类人型运动。功能隔离式转换器让机器人在更小的设计中实现更精确的电机控制,从而使它们更智能、更安全和更高效。
随着低于 60V 的自主移动机器人和类人机器人等机器人承担越来越复杂的角色,它们需要运行更长时间并具有更高的电源效率。精确的电流和电压检测测量直接对精度和快速转矩响应时间产生影响,进而使机器人能够更(gèng)快(kuài)、更(gèng)精(jīng)确(què)地(de)到(dào)达(dá)其(qí)目(mù)前(qián)位(wèi)置(zhì)和(hé)方(fāng)向(xiàng)。在(zài)实(shí)现(xiàn)安(ān)全导航和执行突发任务(例如对负载或环境条件的变化做出反应)时,纳秒级时间至关重要。这些测量结果为机器人的控制系统提供实时数据,使机器人能够即时调整其动作并在执行任务期间保持精度。
电流和电压检测精度会影响精密机器人执行任务的方式;电流和电压检测精度帮助机器人提高准确性。
需要(yào)提(tí)高(gāo)传感能力
尽管电压和电流检测解决(jué)方(fāng)案可以为当今的机器人系统带来诸多益处,但要实现更高性能的感应,仍有许多挑战需要攻克。一个普遍的难题是如何针对提供给电机的电流和电压执行精确的低噪声测量。在目前的机器人系统中,三相逆变器以低电流或低电压电平运行,并产生瞬态噪声,可能会干扰现有非隔离式传感器测量的精度。
在设计具有精细运动技能的机器人时,较慢的转矩响应和较不精确的运动可能会带来巨大的挑战,而执行复杂任务正需要以非常平滑且可控的方式实施这些技能。
设计工程师面临的另一个挑战是许多机器人(包括移动机器人)都由电池供电,因此很难在保持性能的同时优化能效。功率不足还会导致系统故障、任务持续时间有限和运营成本增加。
除了性能方面的挑战之外,紧凑型类人机器人中用于附加传感电路的空间也有限。在不显著增加模块尺寸或系统重量的情况下,集成电流检测和电压检测电路可能是一大难题。
进行机器人设计时,需要在高压和低压域中隔离电源和控制电路。要防止发生短路事件或出现过压情况,就需要快速准确地发现这些故障,以避免损坏其他元件。
实现精确的电流和电压测量
为了克服传统机器人在设计方面的挑战,德州仪器的功能隔离式转换器使设计人员能够实现平稳的转矩操作和精确的电机控制,同时在低于 60V 的紧凑设计中保持小尺寸和低成本。
AMC0106M05 和 AMC0106M25 功能隔离式 Δ-Σ 电流感应调制器以及 AMC0136 功能隔离式电压感应调制器可实现更精确的电流和电压测量。与如今的 8 位到 11 位模拟解决方案相比,这些器件具有 12 到 14 个有效位数 (ENOB),如图 2 所示。测量精度的提高可以改进对低电流和电压电平的测量,从而实现精细的机器人任务和移动。
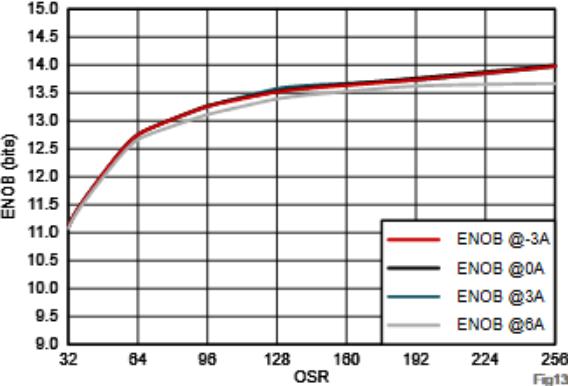
图 2:提高 ENOB 和过采样率有助于降低噪声和提高分辨率
电隔离式调制器具有 150V/ns 的高共模瞬态抗扰度 (CMTI),可改善防噪性能和系统级温漂。数字接口确保脉宽调制开关不会影响测量精度。这些特性使机器人设计人员能够使用 50V/ns 或更高的开关速度来实现高效的氮化镓电机设计。开关栅极时,高 CMTI 还可以降低电源接地噪声干扰微控制器的风险,从而防止数据损坏和性能下降。
除了功能隔离式调制器实现的性能优势外,这些器件采用 3.5mm x 2.7mm 封装,与其他增强型隔离式调制器解决方案相比,可将感应解决方案的尺寸缩小 50% 以上(参阅图 3)。这种更小的外形尺寸还支持使用更小的印刷电路板 (PCB),从而实现更小的机器人。

图 3:AMC0106M05 将 PCB 解决方案尺寸缩小 50%
AMC21C12 功能隔离式比较器有助于实现 290ns 的响应时间,以防止出现短路事件或过压情况等故(gù)障(zhàng)。这(zhè)种(zhǒng)故(gù)障(zhàng)检(jiǎn)测(cè)速(sù)度(dù)可(kě)以(yǐ)通(tōng)过(guò)快(kuài)速(sù)关断(duàn)栅(zhà)极(jí)驱(qū)动(dòng)器(qì)来(lái)帮(bāng)助避免系统中的其他元件损坏。
结语
随着功能隔离式传感和高速转矩响(xiǎng)应(yīng)方(fāng)面(miàn)取得预期进展,人们可以畅想机器人未来可实现的各种可能性。它们可以进行高级显微手术或高速组装小型电子产品。自主移动机器人可以在复杂的环境中更高效地导航;协作机器人可以在装配线中更安全地工作;类人机器人可以进行复杂的维修,甚至还可以洗衣服。
相关新闻







联系我们
地址:山东省济南市槐荫区兴福街道齐鲁大道3189号西进时代中心
电话:15898523365
传真:15898523365
邮箱:service@Kaiyun.cco
网址:http://www.rjptj.com

