






13
2025
-
04
移动机器人电机控制DEMO(原理图+BOM+PCB)
浏览:449
发布:2025-04-13 00:14:03
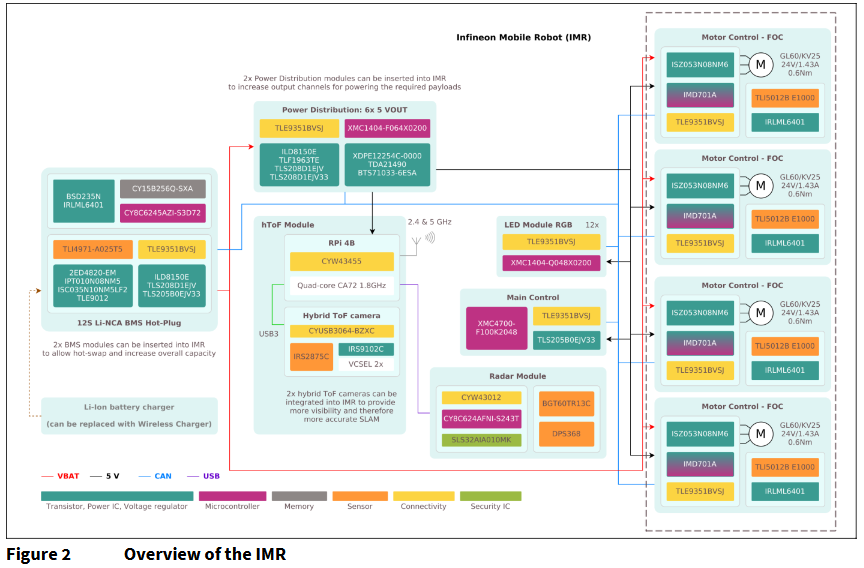
【导语】英飞凌移动机器人电机控制演示板为自主服务机器人提供了一个功能强大的展示平台。通过组合这些演示板,开发者能够轻松体验到英飞凌元器件在机器人技术中的卓越表现。DEMO_IMR_MTRCTRL_V1以其高效、小巧的设计,实现了对电机的精准控制,助力机器人灵活执行任务。同时,MOTIX™IMD701A电机控制器和XENSIV™TLE5012B磁性角度传感器的应用,进一步彰显了英飞凌在电机控制领域的深厚专长。本平台配备详细的设计文件,为开发者提供了便捷的开发路径,适用于移动机(jī)器(qì)人(rén)、AGV、AMR及(jí)机(jī)器(qì)人(rén)开(kāi)发(fā)平(píng)台(tái)等(děng)多(duō)种(zhǒng)应(yīng)用(yòng)场(chǎng)景(jǐng)。
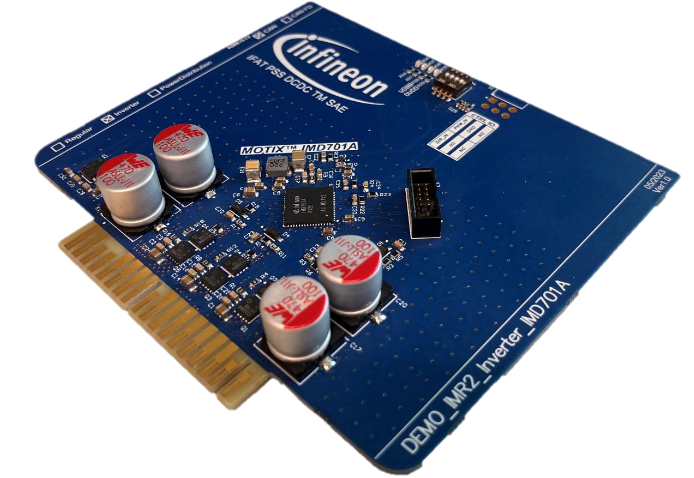
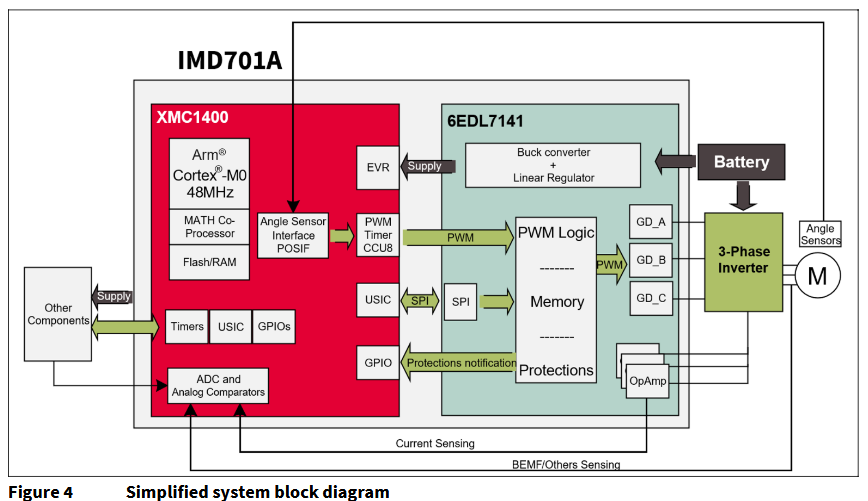
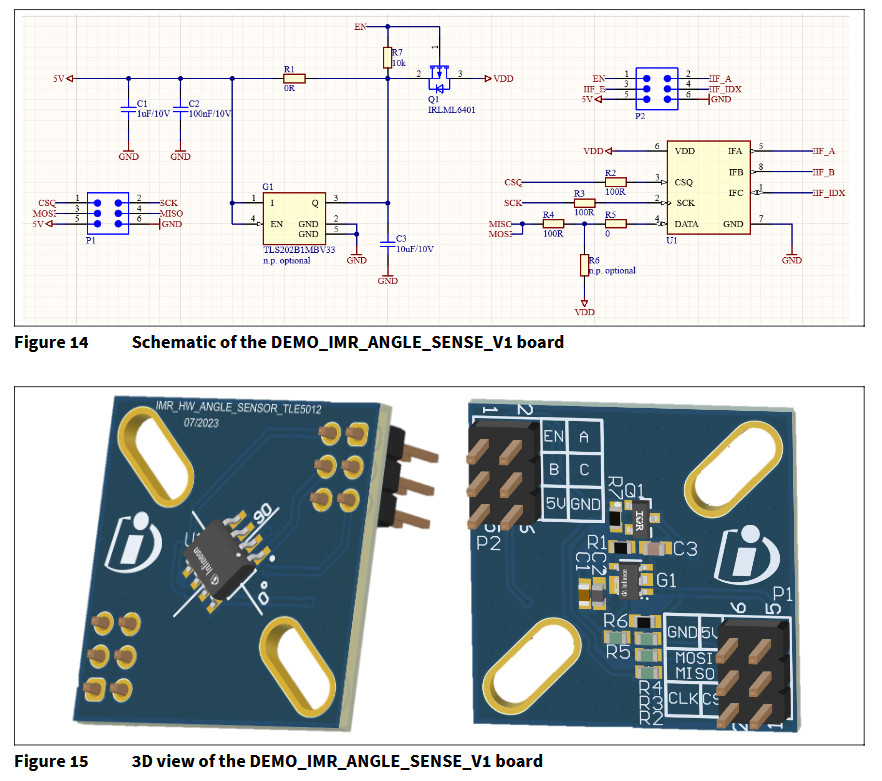
英(yīng)飞(fēi)凌(líng)移(yí)动(dòng)机(jī)器(qì)人电机控制演示板可为采用英飞凌元器件的自主服务机器人功能提供演示平台。这些板可以组合起来创建此平台。DEMO_IMR_MTRCTRL_V1是一种高效、小巧的解决方案,用于控制电机,使机器人能够四处移动并执行所需的任务。MOTIX™IMD701A完全可编程电机控制器充分彰显了英飞凌在这一领域的专长,该控制器结合了XMC1404微控制器和MOTIX™6EDL7141三相栅极驱动器IC,大大降低了BOM,实现了更紧凑的设计。DEMO_IMR_ANGLE_SENS_V1配备了XENSIV™TLE5012B E1000,后者是一款360° 磁性角度传感器,可检测磁场的方向。这项检测的实现方式是使用单片集成式巨磁阻 (iGMR)
元件测量余弦和正弦角度分量。这些原始正弦和余弦信号经过内部数字处理后,可计算出安装在电机轴上磁体的磁场角度方向。
*附件:移动机器人电机控制DEMO设计文件 原理图,bom, PCB.pdf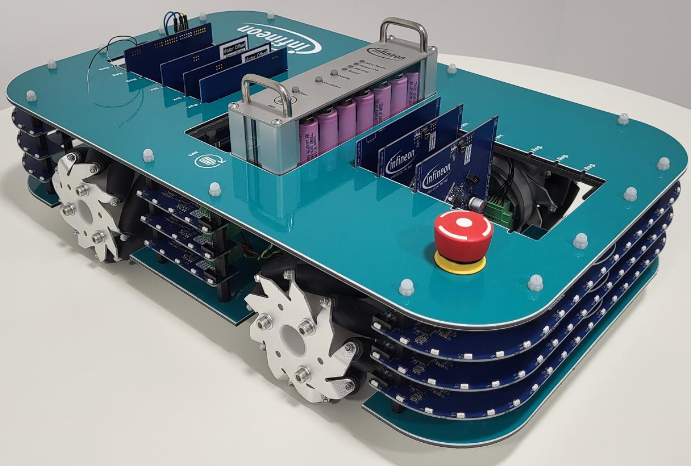
特性
- DEMO_IMR_MTRCTRL_V1
- 完全集成的BLDC电机驱动器
- 集成和配置栅极驱动器输出
- 独立工作或通过GUI
- SVPWM FOC算法
- 18 V到 60 V 工作电压
- 连续电流和最大电流:5A和7A
- 控制频率:20kHz
- 使用POSIF实现传感
- 三相低侧电流测量
- 高效率
- 小尺寸
- 减少元器件数量
- DEMO_IMR_ANGLE_SENS_V1
- 基于GMR的原则
- 集成磁场传感
- 360°角度测量
- 两个高精度单比特SD-ADC
- SSC和增量接口 (IIF)
- 灵活连接
- 可配置输出引脚
- 内部自动校准算法
应用
- 移动机器人(AGV、AMR)
- 机器人技术
- 机器人开发平台(英飞凌移动机器人 (IMR))
DEMO_IMR_MTRCTRL_V1布局
DEMO_IMR_ANGLE_SENS_V1布局
相关新闻







联系我们
地址:山东省济南市槐荫区兴福街道齐鲁大道3189号西进时代中心
电话:15898523365
传真:15898523365
邮箱:service@Kaiyun.cco
网址:http://www.rjptj.com

