






08
2025
-
01
安川工业机器人结构
浏览:545
发布:2025-01-08 16:22:53
本章节进行安川工业机器人介绍分享
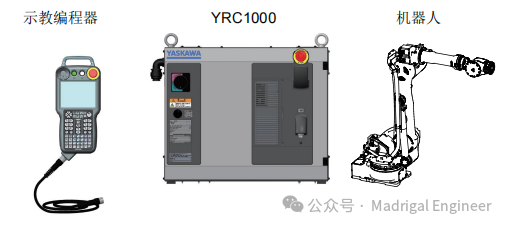
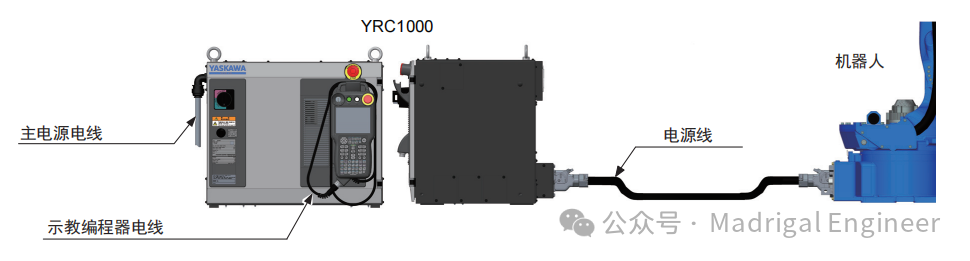
--关于安川工业机器人可分为三部分组成,其分别是:机器人本体、控制柜与示教编程器,当然控制柜与机器人本体间的连接线缆(lǎn)也(yě)是(shì)必(bì)不(bù)可(kě)少(shǎo)的(de)。通(tōng)常(cháng)在(zài)出(chū)厂(chǎng)配(pèi)置(zhì)时(shí)会(huì)配(pèi)有(yǒu)一(yī)根(gēn)5米(mǐ)的(de)连(lián)接(jiē)线(xiàn)缆(lǎn),也(yě)可(kě)以(yǐ)根(gēn)据(jù)现(xiàn)场(chǎng)的(de)实(shí)际(jì)需求来进行选配。
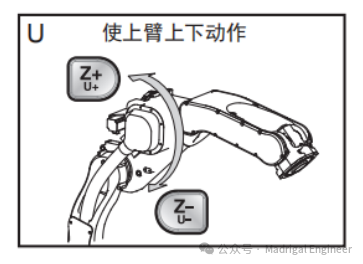
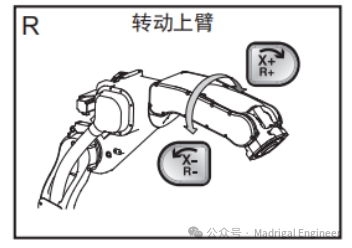
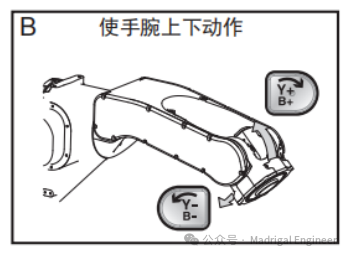
--机器人本体各部分组成:由图可知安川6轴工业机器人可分为机器人底座、S头、L臂、U臂、手腕法兰盘,对应一到六轴分别称为S轴、L轴、U轴、R轴、B轴、T轴。
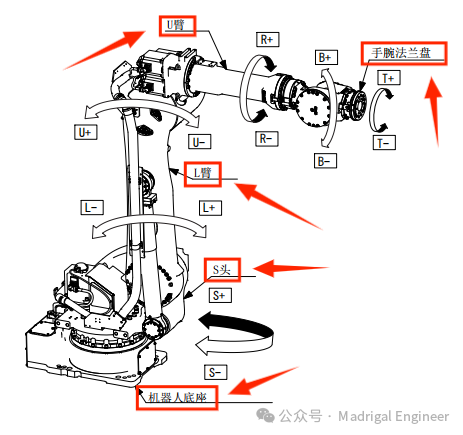
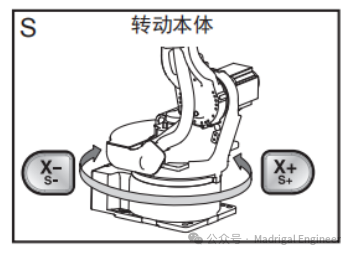
--再带大家了解以下各轴的运作方向,一轴即S轴
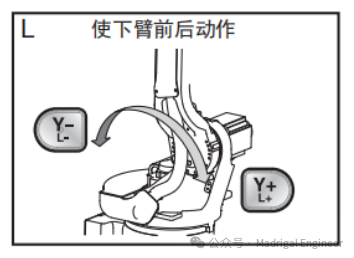
二轴即L轴
三轴即U轴
四轴即R轴
五轴即B轴
六轴即T轴
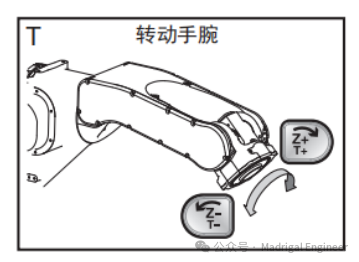
--在进行调试时一定要明确各轴的运转方向(+-),能够避免安全问题。
--了解完机器人各轴运作方向现在再带大家了解一下主电源线缆的连接:
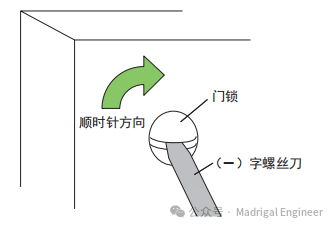
--先使用一字刀将开关正下方的门锁顺时针旋转,在开关置于OFF档(dàng)时(shí)即(jí)可(kě)将(jiāng)控(kòng)制(zhì)柜(guì)门(mén)打(dǎ)开(kāi),切(qiè)记(jì)不(bù)可(kě)强(qiáng)行(xíng)拉(lā)开(kāi),避(bì)免(miǎn)损(sǔn)伤机器人控制柜。
--随后在控制柜内部的左上方即可看到主电源的断路器,在将盖子取下后即可进行线缆的连接(3x380)。在连接完成后将盖子(zi)复(fù)位即可。随后在关上柜门后将门锁逆时针旋转即可。

--接下来带大家了解一下控制柜与机器人本体线缆的连接,由出厂配置的线缆与控制柜后方的接口和机器人本体后方的接口进行连接,要注意每个接口上都有对应的标识,一定要确认好之后再进行连接。
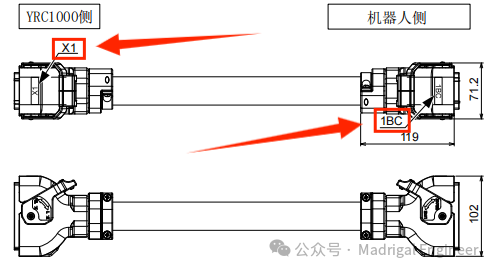
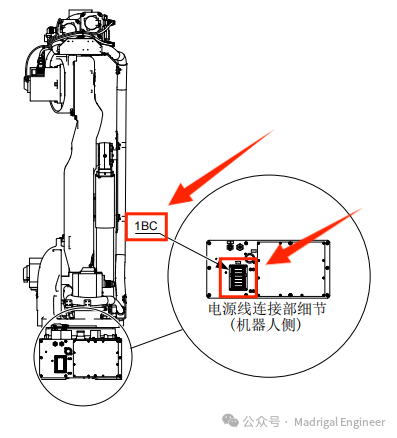
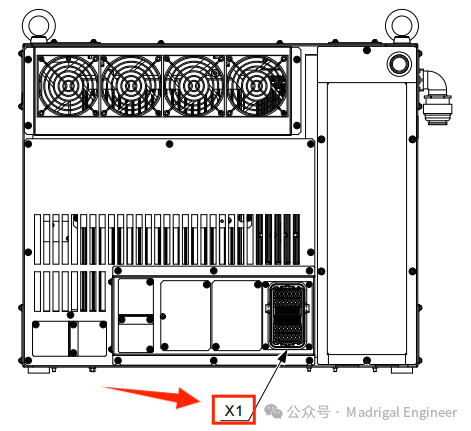
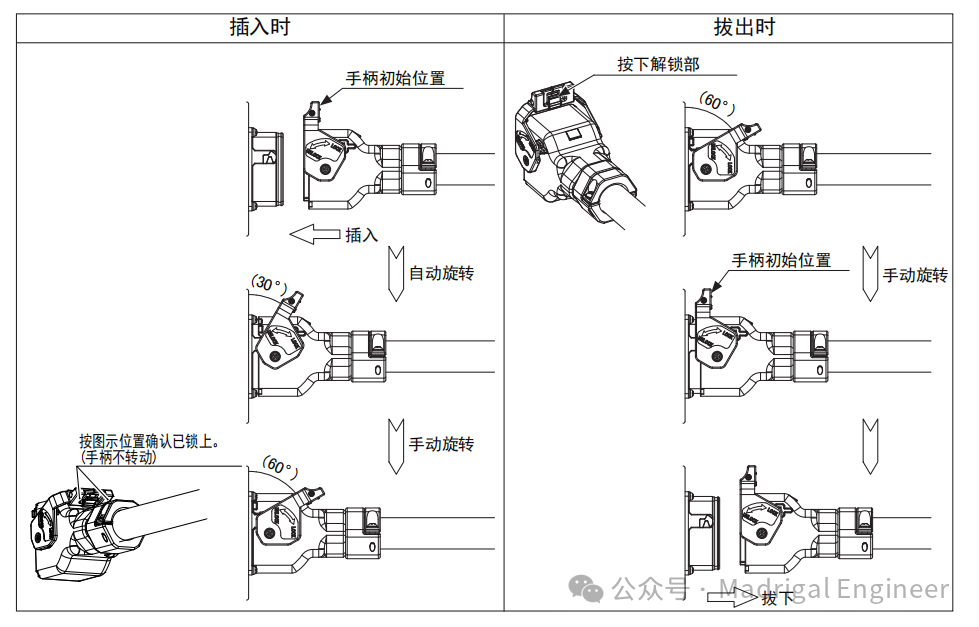
--在确认好对应接口无误后即可进(jìn)行(xíng)连接,先将手柄恢复到初始位置,对齐插入后手柄会自动落下30°,随后再将手柄按压下,不会再转动即可。拔下插头是需要先将手柄恢复至初始位置,再将接口拔出即可。
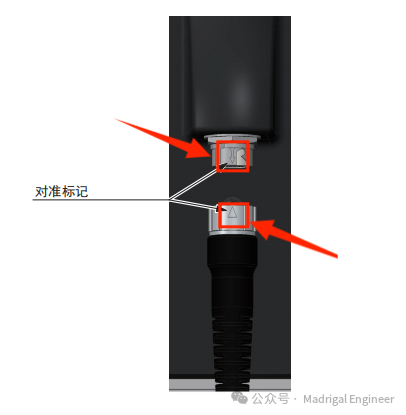
--最后一步示教器线缆的连接,是将示教器的接口与控制柜门右下方的连接器接上,对准标记,插入即可。
--至此,机器人本体、控制柜、示教编程器的连接就以全部完成。
相关新闻







联系我们
地址:山东省济南市槐荫区兴福街道齐鲁大道3189号西进时代中心
电话:15898523365
传真:15898523365
邮箱:service@Kaiyun.cco
网址:http://www.rjptj.com

