






23
2025
-
04
工业设施数字孪生中的机器人仿真
浏览:441
发布:2025-04-23 01:31:19
【导语】随着科技的飞速发展,工业企业正积极拥抱物理AI和自主系统,以重塑其运营模式。通过在整个工厂和仓库部署包括移动机器人、人形助手、智能摄像头在内的异构机器人机群,企业正迈向真正的工业自主化。为了实现这一转型,数字孪生技术成为了关键。借助NVIDIA Omniverse Blueprint这一强大工具,企业能够仿真和优化自主系统的交互与复杂任务执行,从而在实际部署前验证机器人机群的协调与适应能力。本文将深入探讨NVIDIA Omniverse Blueprint的架构与组成部分,助力开发者构建并验证自己的机器人机群仿真管线,以加速工业自主化的进程。
工业企业正在积极使用物理 AI 和自主系统改变自己的运营方式。这涉及到在整个工厂和仓库部署异构机器人机群,包括移动机器人、人形助手、智能摄像头和 AI 智能体等。
为了充分发挥这些物理 AI 系统的潜力,企业需要依靠其设施的数字孪生(即用于仿真和优化自主系统如何交互和执行复杂任务的虚拟环境)。这种以仿真为中心的方法使企业能够在实际部署前验证机器人机群在动态环境中的协调和适应能力,从而更快过渡到真正的工业自主化运营。
工业数字孪生中的机器人机群仿真
Mega NVIDIA Omniverse Blueprint 可帮助企业加快工厂、仓库和工业设施中的物理 AI 开发与部署。
借助该工(gōng)作(zuò)流,开发者能够使用传感器仿真与合成数据生成技术对复杂的自主运营进行仿真,并在实际部署前在工业数字孪生中验证物理 AI 系统的性能。
本文将解释该蓝图的各个组成部分,以便您开发自己的机器人机群仿真和验证管线。

图(tú) 1 Mega NVIDIA Omniverse Blueprint 的(de)架(jià)构(gòu)
设(shè)施或机群管理系统
机群管理系统负责帮助企业管理、协调和优化机器人机群,以实现特(tè)定(dìng)目标或完成特定任务,例如运输货物、分拣物品、管理库存等。为了提高决策能力,可以将这些系统集成到工(gōng)作(zuò)流(liú)中(zhōng)。在(zài)将(jiāng)这(zhè)些(xiē)系(xì)统连接到企业数据湖后,机群管理器就可以访问并使用大量数据提高协调性和优化机群任务。
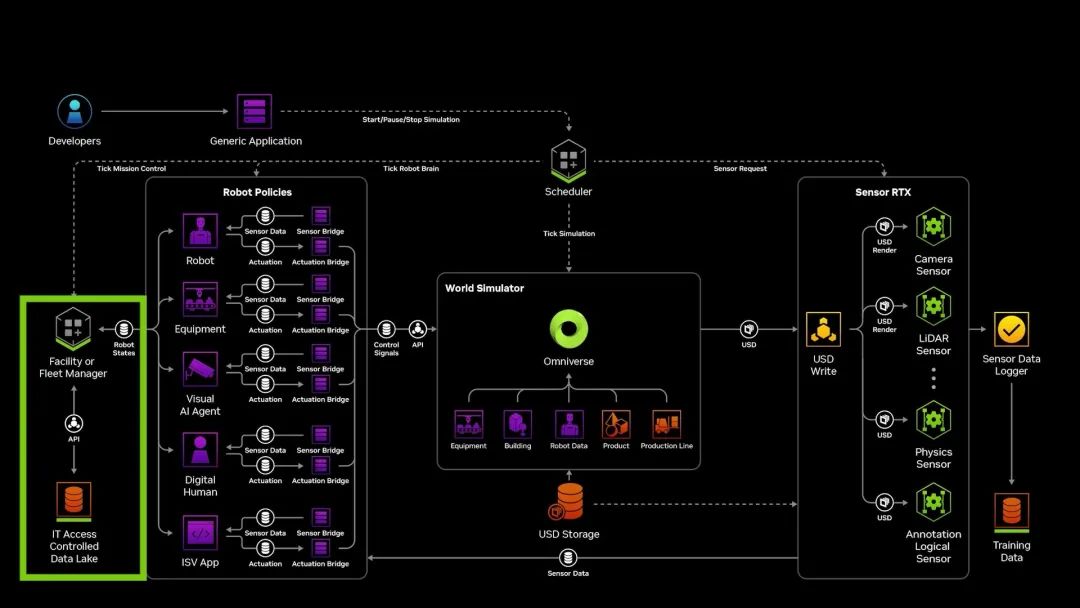
图 2 机群管理系统帮助企业管理、协调和优化机器人机群
该蓝图中的集成机群管理软件使用行业标准 VDA5050 接口与各种机器人大脑连接。该接口是机器人机群与中央主控制器之间进行通信的开放标准,可确保机群管理器能够有效地与机器人进行通信并对其进行控制。
机器人大脑和机器人策略
机器人大脑是简单还是复杂取决于实际机器人操作的需要。作为决策系统,机器人大脑或策略根据接收到的输入决定机器人应该做什么,并通过输入数据和输出操作定义行为。传感器通过各种方式——例如摄像头或激光雷达——收集数据,然后机器人根据所学策略对这些数据进行处理。在处理完毕后,策略就会输出动作,然后将动作发送给执行器。这些机器人大脑以容器的形式集成到该蓝图中,提供了与真实机器人相同的执行和传感器接口。
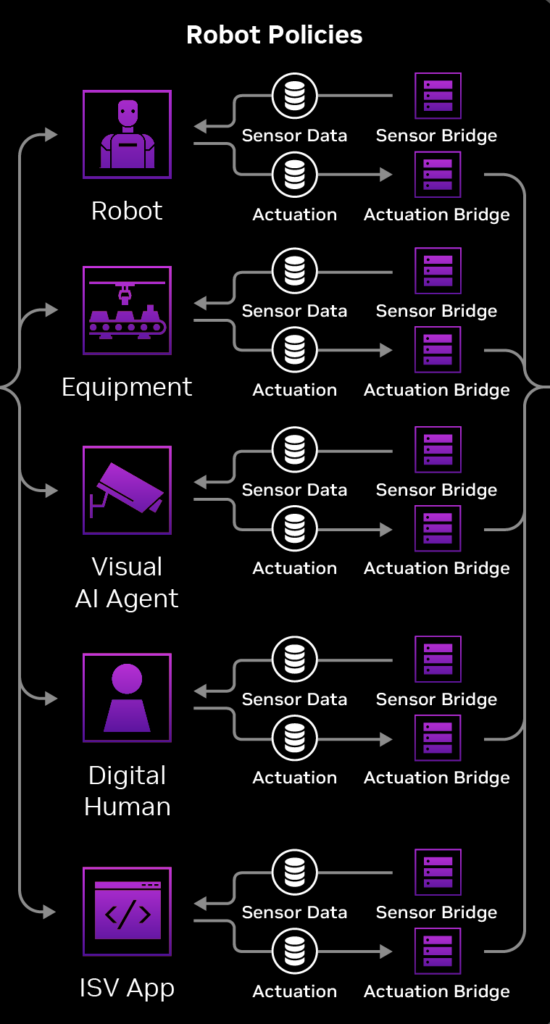
图 3 机器人策略蓝图架构的组成部分
机器人大脑通过执行接口向机器人本体发送执行或控制信号。该蓝图提供了执行接口的参考实现,可根据正确的通用场景描述(OpenUSD)模式(schema)将执行命令转化为 ROS2 主题,确保控制信号准确传输至虚拟环境中的机器人本体。
执行接口对于控制机器人的动作和行动至关重要。开发者可根据具体机器人大脑的需要修改或替换该接口,使控制信号符合每个机器人的特殊要求。
机器人大脑通过传感器接口接收来自传感器的数据。该蓝图为开发者提供了传感器接口的参考实现,可将通过传感器 RTX 的 gRPC 流接收到的传感器数据转换为供机器人大脑使用的 ROS2 主题。这可以保证机器人大脑接收到准确、及时的传感器数据,以便做出明智的决策和成功执行任务。
开发者还可以将使用 NVIDIA Metropolis 和适用于视频搜索和摘要的 NVIDIA AI 蓝图构建的高级视觉 AI 智能体集成到工作流中,为工业运营提供更加丰富的洞察和更好的决策。
世界仿真器
世界仿真器(World Simulator)使用 NVIDIA Omniverse 开发而成并以 OpenUSD Stage 表示。该仿真器在仿真运行时运行,负责维护仿真状态和确保所有组件的同步性与准确性。
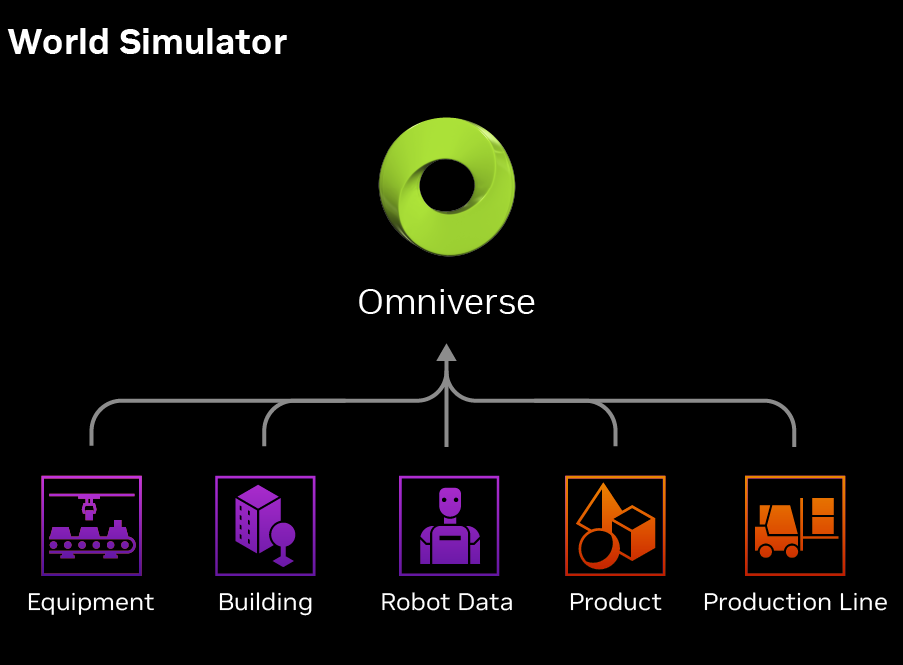
图 4 世界仿真器蓝图负责维护仿真状态
传感器 RTX
NVIDIA Omniverse 云传感器 RTX API 使开发者能够对机器人在现实世界中遇到的情况进行精确的仿真。开发者可以使用(yòng)这(zhè)些(xiē) API 渲(xuàn)染(rǎn)摄(shè)像(xiàng)头(tóu)、雷(léi)达(dá)和(hé)激(jī)光(guāng)雷(léi)达(dá)传(chuán)感(gǎn)器(qì)的(de)输(shū)出(chū),并(bìng)结(jié)合(hé)世(shì)界(jiè)仿(fǎng)真(zhēn)器(qì)生(shēng)成(chéng)的(de) OpenUSD 数(shù)据(jù)创(chuàng)建(jiàn)全面(miàn)、达(dá)到(dào)物(wù)理(lǐ)学(xué)精(jīng)度(dù)的(de)工(gōng)业(yè)设(shè)施(shī)数(shù)字(zì)孪(luán)生(shēng)。这(zhè)些(xiē) API 构(gòu)建(jiàn)在(zài) NVIDIA 托(tuō)管(guǎn)可(kě)扩(kuò)展(zhǎn)功(gōng)能(néng)的(de)云(yún)框(kuāng)架(jià)——NVIDIA Cloud Functions 上(shàng)。
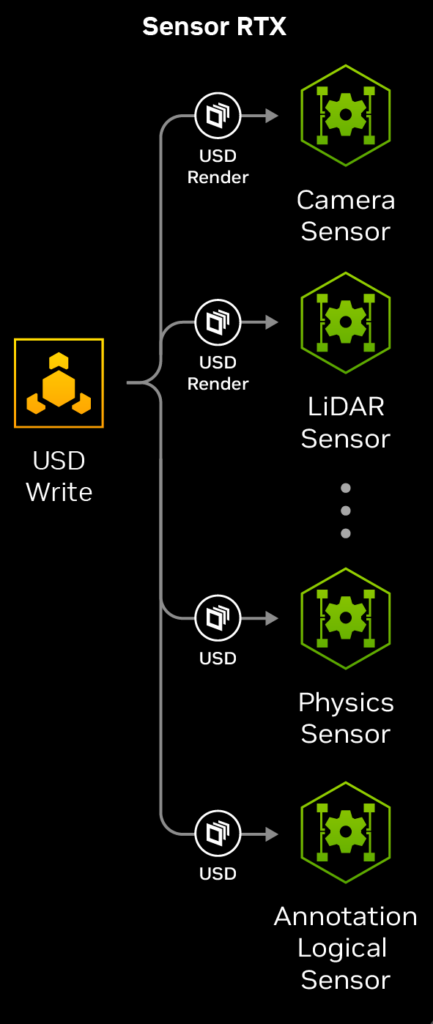
图(tú) 5 传(chuán)感(gǎn)器(qì) RTX 可(kě)对(duì)机(jī)器(qì)人(rén)在(zài)现(xiàn)实(shí)世(shì)界(jiè)中(zhōng)遇(yù)到(dào)的(de)情(qíng)况(kuàng)进(jìn)行(xíng)精(jīng)确(què)的(de)仿(fǎng)真(zhēn)
调(diào)度(dù)器(qì)
最(zuì)后(hòu)但(dàn)同(tóng)样(yàng)重(zhòng)要(yào)的(de)是(shì)管(guǎn)理(lǐ)时(shí)间(jiān)和(hé)整(zhěng)体(tǐ)执(zhí)行(xíng)情(qíng)况(kuàng)的(de)调(diào)度(dù)器(qì)。调(diào)度(dù)器(qì)负(fù)责(zé)对(duì)延(yán)迟(chí)情(qíng)况(kuàng)进(jìn)行(xíng)建(jiàn)模(mó)、管(guǎn)理(lǐ)多(duō)速(sù)率(lǜ)执(zhí)行(xíng)以(yǐ)及(jí)在(zài)执(zhí)行(xíng)复(fù)杂(zá)的(de)生(shēng)产(chǎn)者(zhě)-消(xiāo)费(fèi)者(zhě)图(tú)时(shí)遵(zūn)守(shǒu)数(shù)据(jù)依(yī)赖(lài)关系(xì),保(bǎo)证(zhèng)仿(fǎng)真(zhēn)能(néng)够(gòu)顺(shùn)利(lì)、准(zhǔn)确(què)地(de)运(yùn)行(xíng),从(cóng)而(ér)提(tí)供(gōng)一(yī)个(gè)可(kě)靠(kào)的(de)测(cè)试(shì)和(hé)验(yàn)证(zhèng)环(huán)境(jìng)。
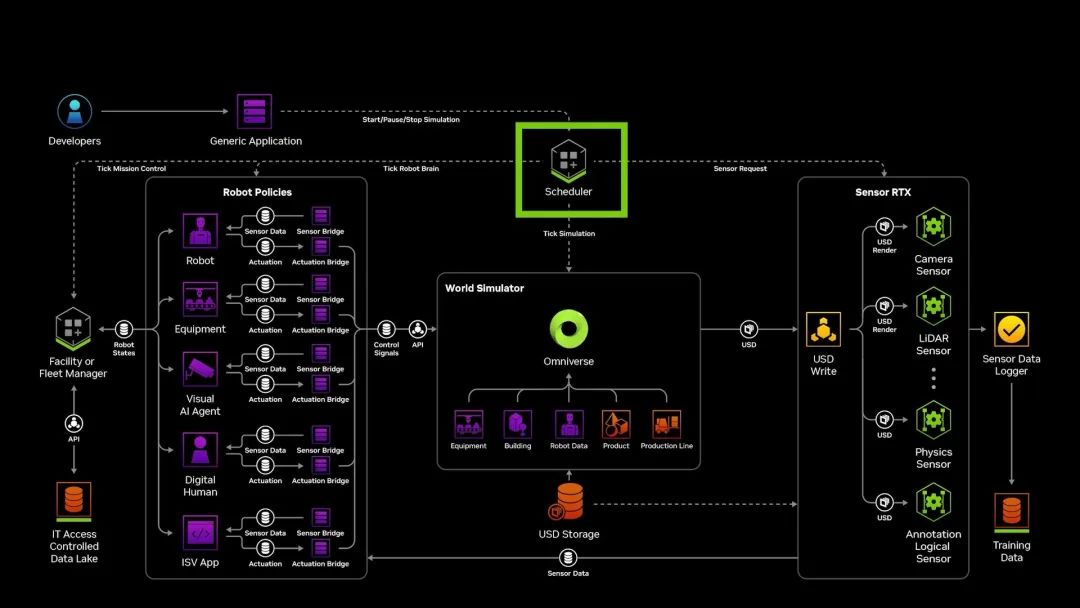
图(tú) 6 调(diào)度(dù)器(qì)管(guǎn)理(lǐ)时(shí)间(jiān)和(hé)整(zhěng)体(tǐ)执(zhí)行(xíng)
开(kāi)始(shǐ)使(shǐ)用(yòng)
通(tōng)过(guò)使(shǐ)用(yòng)这(zhè)一(yī)强(qiáng)大(dà)的(de)参(cān)考(kǎo)工(gōng)作(zuò)流(liú),开(kāi)发(fā)者(zhě)可(kě)以(yǐ)测(cè)试(shì)复(fù)杂(zá)的(de)场(chǎng)景(jǐng)、降(jiàng)低(dī)机(jī)队(duì)测(cè)试(shì)成(chéng)本(běn)、加(jiā)快(kuài)调(diào)试(shì)速(sù)度(dù)并(bìng)提(tí)高(gāo)实际运营的效率和效果。
入门者可使用开发者入门套件快速开发和改进自己的应用和服务。
相关新闻







联系我们
地址:山东省济南市槐荫区兴福街道齐鲁大道3189号西进时代中心
电话:15898523365
传真:15898523365
邮箱:service@Kaiyun.cco
网址:http://www.rjptj.com

