






25
2025
-
04
实现“AI+”关键突破,剖析人形机器人里的关键技术和未来趋势
浏览:440
发布:2025-04-25 17:01:40
【导语】2025年,全球AI与机器人产业迎来历史性转折点,人形机器人正逐步走出实验室,迈向工厂、医院及家庭,预示着人类社会运行模式的深刻变革。瑞萨电子作为行业先锋,在人形机器人的电机控制和传感器领域积极布局,以其先进的芯片解决方案引领技术潮流。本文将深入探讨瑞萨电子如何助力人形机器人技术革新,以及人形机器人技术的未来发展趋势。
电子发烧友网报道(文 / 吴子鹏)2025 年,全球 AI 与机器人产业正站在历史性的转折点上。在技术不断迭代以及政策大力支持的双重驱动下,人形机器人这一先进的产品形态正从实验室逐步迈向工厂、医院乃至家庭,势必深(shēn)刻(kè)改(gǎi)变(biàn)人(rén)类(lèi)社(shè)会(huì)的(de)运(yùn)行(xíng)模式。
在《人形机器人的电机控制和传感器》专题中,瑞萨电子嵌入式处理器事业部高级经理刘涛在接受电子发烧友网采访时表示,人形机器人被誉为 “人工智能 +” 的重要突破口。从结构组成来看,人形机器人主要由驱动、感知、控制三大系统构成,而芯片则是这三个系统的核心所在。在人形机器人的关节电机驱动以及传感融合等关键领域,瑞萨电子提供了丰富多样的解决方案。

瑞萨电子嵌入式处理器事业部高级经理刘涛
瑞(ruì)萨(sà)电(diàn)子(zi)在(zài)人(rén)形(xíng)机器人控制和驱动方面的布局
在人形机器人中,上述三大系统各自发挥着(zhe)关键作(zuò)用(yòng)。具(jù)体(tǐ)表(biǎo)现(xiàn)如(rú)下(xià):
驱(qū)动(dòng)系(xì)统(tǒng):驱(qū)动(dòng)位(wèi)置(zhì)决(jué)定(dìng)了(le)不(bù)同(tóng)驱(qū)动(dòng)器(qì)的(de)需(xū)求(qiú),不(bù)同(tóng)的(de)电(diàn)机(jī)类(lèi)型(xíng)也(yě)对(duì)应(yīng)着(zhe)不(bù)同(tóng)算(suàn)法(fǎ),常(cháng)见(jiàn)的(de)有(yǒu) FOC 算(suàn)法(fǎ)等(děng)。
控(kòng)制(zhì)系(xì)统(tǒng):人(rén)形(xíng)机(jī)器(qì)人(rén)需要执行复(fù)杂(zá)多(duō)变(biàn)的(de)动(dòng)作(zuò),其(qí)自(zì)由(yóu)度(dù)越(yuè)来(lái)越(yuè)高(gāo),对(duì)周(zhōu)围(wéi)环(huán)境(jìng)的(de)响(xiǎng)应(yīng)速(sù)度(dù)也(yě)越(yuè)来(lái)越(yuè)快(kuài)。从(cóng)平(píng)稳(wěn)行(xíng)走(zǒu)到(dào)精(jīng)准(zhǔn)抓(zhuā)取(qǔ),再(zài)到(dào)维(wéi)持(chí)平(píng)衡(héng),背(bèi)后(hòu)离(lí)不(bù)开(kāi)高(gāo)精(jīng)度(dù)的(de)运(yùn)动(dòng)控(kòng)制(zhì)算(suàn)法(fǎ)、快(kuài)速(sù)响(xiǎng)应(yīng)的(de)通(tōng)信(xìn)接(jiē)口(kǒu)、灵(líng)活(huó)的(de)网(wǎng)络(luò)拓(tà)扑(pū)、更(gèng)多(duō)的(de)电(diàn)机(jī)驱(qū)动(dòng)器(qì),以(yǐ)及(jí)能(néng)够(gòu)支(zhī)撑(chēng)算(suàn)法(fǎ)和(hé)算(suàn)力(lì)的(de)控(kòng)制(zhì)芯(xīn)片(piàn),以(yǐ)此(cǐ)确(què)保(bǎo)机(jī)器(qì)人(rén)动(dòng)作(zuò)流(liú)畅(chàng)且(qiě)精(jīng)准(zhǔn)。
感(gǎn)知(zhī)系(xì)统(tǒng):人(rén)形(xíng)机(jī)器(qì)人(rén)需(xū)借(jiè)助(zhù)多(duō)种(zhǒng)传(chuán)感(gǎn)器(qì)(如(rú)视(shì)觉(jué)传(chuán)感(gǎn)器(qì)、力(lì)传(chuán)感(gǎn)器(qì)、陀(tuó)螺(luó)仪(yí)等(děng))来(lái)感(gǎn)知(zhī)环(huán)境(jìng),并(bìng)对(duì)这(zhè)些(xiē)传(chuán)感(gǎn)器(qì)信(xìn)号(hào)进(jìn)行(xíng)高(gāo)效(xiào)采集、处(chù)理(lǐ)与(yǔ)融(róng)合(hé)。
刘(liú)涛(tāo)指(zhǐ)出(chū),针(zhēn)对(duì)上(shàng)述(shù)需(xū)求(qiú),瑞(ruì)萨(sà)正(zhèng)在(zài)加(jiā)速(sù)布(bù)局(jú)。首(shǒu)先(xiān),针(zhēn)对(duì)机(jī)器(qì)人(rén)手(shǒu)臂(bì)关节(jié)驱(qū)动(dòng),瑞(ruì)萨(sà)电(diàn)子(zi)推(tuī)出(chū)了(le)已(yǐ)量(liàng)产(chǎn)的(de) RZ/T2M、RZ/T2L 或(huò)者(zhě) RZ/N2L 系(xì)列(liè)产(chǎn)品(pǐn)。该(gāi)系(xì)列(liè)产(chǎn)品(pǐn)不(bù)仅(jǐn)支(zhī)持(chí) EtherCAT 网(wǎng)络(luò)通(tōng)信(xìn),还(hái)配(pèi)备(bèi)了(le)专(zhuān)用(yòng)的(de)绝(jué)对(duì)值(zhí)编(biān)码(mǎ)器(qì)接(jiē)口(kǒu),如(rú) BiSS、Endat、Hiperface 等(děng),以(yǐ)及(jí)增(zēng)量(liàng)式(shì)编(biān)码(mǎ)器(qì)接(jiē)口(kǒu),可(kě)满(mǎn)足(zú)电(diàn)机(jī)位(wèi)置(zhì)信(xìn)息捕获需求,支持 2 个或更多编码器接口。此外,还有丰富的电机外设接口,如 PWM、ADC、Delta - sigma 接口等。这些高度集成的芯片能够最大限度减少 PCB 布线,特别契合机器人手臂的小型化设计目标。
目前,围绕 RZ/T2L 等系列产品,瑞萨电子在伺服电机驱动方面已积累了大量成功案例。同时,瑞萨也正计划开发基于下一代 RA8 M85 内核 MCU 的人形机器人关节驱动解决方案。届时,客户可基于瑞萨的参考设计,快速部署原型机并投入量产,相关硬件原理图、软件例程、底层驱动等资料都将免费提供给客户参考。
针对多个自由度的机器手臂控制,瑞萨电子已量产 RZ/T2H MPU。该芯片集成了四个高性能的 Cortex - A55 核和两个实时控制 Cortex - R52 核,具备强大的应用处理能力与实时性能。它不仅能够实现对多达 9 轴工业机器人电机的高速、高精度实时控制,为机器人赋予强大的运动控制能力及网络通信能力,支持工业以太网的主从协议,还能在单芯片上支持包括时间敏感网络 TSN 和工业以太网在内的各种网络通信,使人形机器人能够与外部设备实现高效通信与协同工作。除 RZ/T2H 外,瑞萨电子还以每年超 15 款的 MCU 和 MPU 新产品量产上市的研发速度,持续纵横双向拓展产品布局,以满足未来更复杂的人形机器人及其他应用需求。
瑞萨电子在人形机器人感知和传输方面的布局
前文提到了人形机器人感知系统的基本构成,视觉传感器、触觉传感器、惯性测量单元(IMU)、六维力传感器为人形机器人提供了多维度的感知能力,使其能够更好地与环境交互并执行复杂任务。下面来分析一下感知系统的作用:它是人形机器人环境感知与信息输入的端口,能够实时采集环境的三维数据,构建动态空间模型,帮助机器人识别障碍物、地形特征及物体位置,提供全面的环境信息输入;它也是人形机器人人机交互的基础,使机器人能够感知接触压力、温度等,实现与人类的轻柔互动,并可识别人体动作、面部表情及语音指令,增强服务场景下的自然交互能力。
针对传感器融合与处理方面,瑞萨电子同样提供了一系列解决方案。为助力人形机器人实现领先的视觉感知能力,瑞萨电子通过旗下高性能的 MCU 和 MPU 支持视觉传感器的数据处理,从而确保复杂图像信息能够被高效且精准地捕获。例如,瑞萨电子提供的具有高算力的四核视觉 AI 微处理器 - RZ/V2H,采用 DRP - AI3(动态可重配置处理器)加速器和高性能实时处理器,具备高算力、低功耗的特性,无需冷却风扇,即可满足处理复杂的实时物体识别及推理任务,非常适合机器人应用所需的动态计算以及实时处理性能。

RZ/V2H介绍
在 AI 算法上,瑞萨电子专注于视觉识别的 AI 应用层面。比如,在 RZ/V2H 上集成了瑞萨电子独创的 AI 加速器 DRP - AI(动态可重配置处理器),可提供高达 8TOPS(紧密模型)的算力及高达 10TOPS/W 的极佳 AI 能效。其低功耗特性无需冷却风扇,非常适合人形机器人电池供电,能最大限度提高效率,延长机器人的工作时间。
在传感融合和处理方面,瑞萨电子还提供集成高精度 AFE 前端的 RX23E MCU,能够为高精度的传感器提供完整的感知能力。不仅如此,瑞萨电子还提供传感器部件中的模拟芯片,用于调节温度、速度、位置、配电等。此外,为实现传感器数据的高效处理和融合,瑞萨具备强大计算能力和丰富模拟外设的 RA 系列 MCU 和 RZ 系列 MPU,能够支持复杂的传感器融合算法。结合深度学习技术,瑞萨电子的解决方案能够在端点设备上运行先进的传感器融合算法,助力系统实现快速决策推断。
在传感融合算法方面,瑞萨电子拥有专为非视觉感应设计的先进信号处理方法,用于数学计算、端侧部署。例如,瑞萨的 Reality AI 平台工具使用 SVM(支持向量机,Support Vector Machines)和 NN(神经网络,Neural Network)作为模型的基本算法,其独具特色的探索特征空间的算法,可用于区分不同类别、预测变量或检测异常等不同应用,拥有多项技术专利,能够帮助开发者在云端构建专属的 AI 模型,并在本地边缘节点上完成部署。
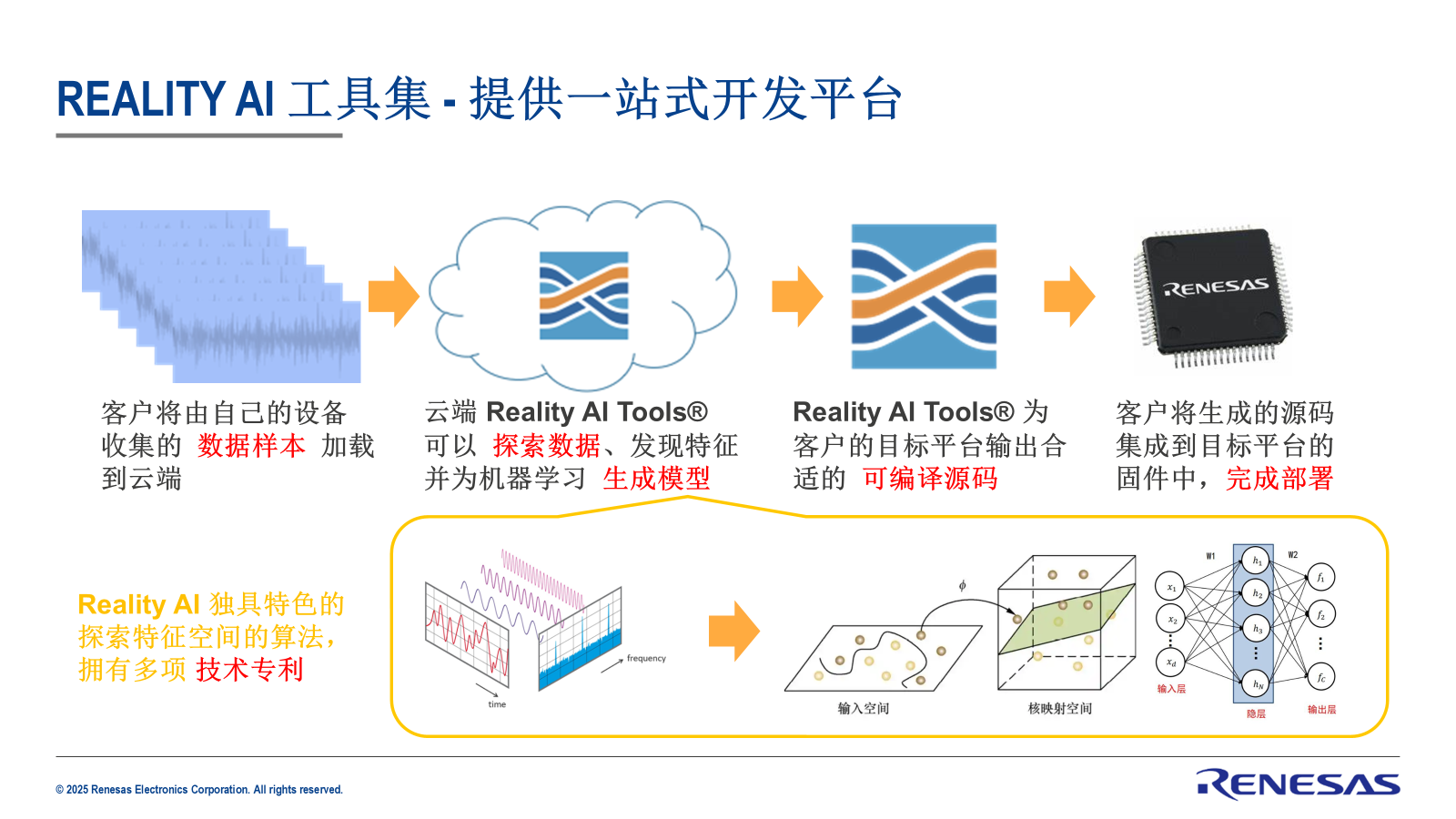
Reality AI平台工具
最后,无论是控制、驱动,还是感知,这些信号都需要传输。传统电机方案通信接口较为单一,而人形机器人变得越来越复杂且精确,这就要求在设计时配备一个快速、实时性强的通信系统,该系统需支持不同关节之间高速带宽的数据传输,并且在空间受限的环境中,对器件的要求尤为苛刻。
针对高效的信号传输需求,瑞萨电子推出的 RZ/T2x、RZ/N2x 系列家族 MPU 均能够实现 EtherCAT 的网络通信,带宽高达 1000Mbps,通过多路复用可实现各种 3x EtherCAT、2x EtherCAT + 1x Ethernet 或者 3x Gigabit TSN 等多种不同的以太网协议配置,为机器人的网络通信提供灵活的网络拓扑。另外,瑞萨电子还全面支持 TSN 下一代千兆工业网络,内置的千兆 TSN(基于 IEEE802.1Q 开发的一套协议标准)交换机,并搭配内置的千兆 MAC,支持时间同步 (802.1 AS - 2020, 802.1 AS - Rev)、数据调度和流量整形(Qbv)和帧抢占(Qbu/Qbr)等 TSN 协议族,以实现数据在同一网络的实时、确定性传输,实现人形机器人关节之间无缝的确定性协调,改善人形机器人关节作为一个子系统的实时决策和多个电机之间的同步、协调任务。
除此之外,瑞萨电子旗舰产品 RZ/T2H 还配备了高性能多核处理器、高精度三相 PWM 定时器、用(yòng)于(yú)测(cè)量(liàng)电(diàn)流(liú)值(zhí)的(de) Δ - Σ 接(jiē)口和多种编码器接口,以及编码器接口(支持 A - format™、EnDat、BiSS®、Hyperface DSL 和 FA - CODER),可实现对多达 9 轴工业机器人电机的高速、高精度控制。
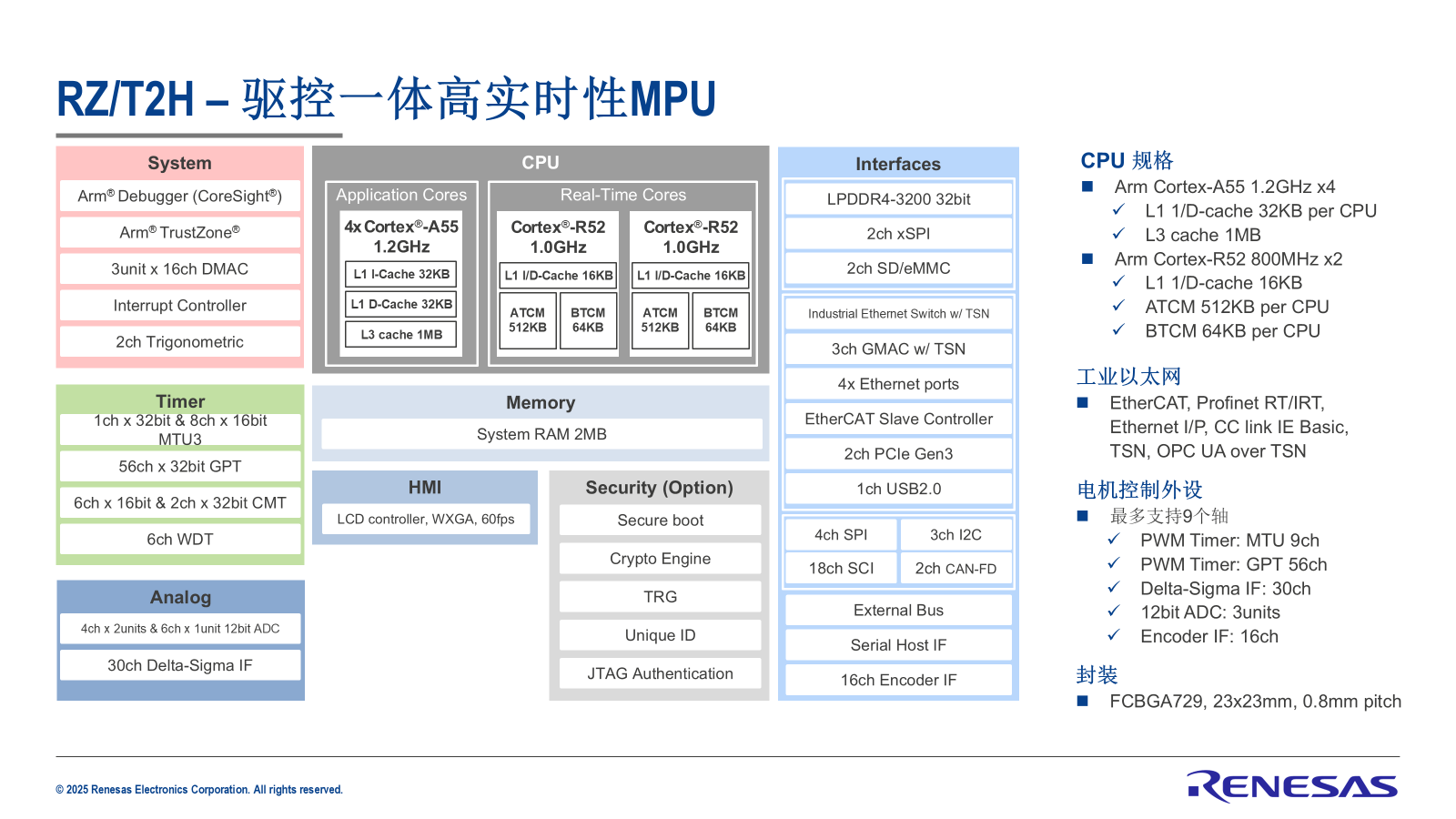
RZ/T2H系统框图
人形机器人的技术趋势和瑞萨电子的应对之策
美国高盛集团去年预测,到 2035 年,人形机器人的潜在市场规模预计将达到 380 亿美元,届时人形机器人出货量将更多、成本将更低、盈利速度将更快。然而,目前众多从业者认为这份预测过于保守。继计算机、智能手机和新能源汽车之后,人(rén)形(xíng)机(jī)器(qì)人(rén)被(bèi)视(shì)作(zuò)新(xīn)一(yī)代(dài)具(jù)有(yǒu)颠(diān)覆(fù)性(xìng)的(de)智(zhì)能(néng)终(zhōng)端(duān),有(yǒu)望(wàng)形(xíng)成(chéng)新(xīn)的(de)万(wàn)亿(yì)元(yuán)级(jí)别(bié)市(shì)场(chǎng)。那(nà)么(me),现(xiàn)阶(jiē)段(duàn)人(rén)形(xíng)机(jī)器(qì)人(rén)技(jì)术(shù)发(fā)展(zhǎn)呈(chéng)现(xiàn)怎(zěn)样(yàng)的(de)趋(qū)势(shì)呢(ne)?刘(liú)涛(tāo)围(wéi)绕(rào)电(diàn)机(jī)驱(qū)动(dòng)和(hé)传(chuán)感(gǎn)应(yīng)用(yòng)分(fēn)别(bié)进(jìn)行(xíng)了(le)解(jiě)读(dú)。
在(zài)人(rén)形(xíng)机(jī)器(qì)人(rén)领(lǐng)域,电(diàn)机(jī)控(kòng)制(zhì)技(jì)术(shù)正(zhèng)朝(cháo)着(zhe)更(gèng)高(gāo)精(jīng)度(dù)与(yǔ)响(xiǎng)应(yīng)速(sù)度(dù)的(de)方(fāng)向(xiàng)发(fā)展(zhǎn)。随(suí)着(zhe)应(yīng)用(yòng)场(chǎng)景(jǐng)的(de)不(bù)断(duàn)拓(tà)展(zhǎn),机(jī)器(qì)人(rén)需(xū)要(yào)在(zài)复(fù)杂(zá)环(huán)境(jìng)中(zhōng)完(wán)成(chéng)高(gāo)精(jīng)度(dù)任(rèn)务(wu),例(lì)如(rú)抓(zhuā)取(qǔ)易(yì)碎(suì)物(wù)品(pǐn)或(huò)进(jìn)行(xíng)微(wēi)创(chuàng)手(shǒu)术(shù)辅(fǔ)助(zhù)。这(zhè)就(jiù)要(yào)求(qiú)电(diàn)机(jī)控制能够精确调节扭矩和位置,同时具备快速响应能力,以实现自然流畅的运动。此外,高度集成化与小(xiǎo)型(xíng)化(huà)也(yě)是(shì)电(diàn)机(jī)控(kòng)制(zhì)的(de)重(zhòng)要(yào)发(fā)展(zhǎn)趋(qū)势(shì)。
为满足人形机器人对空间和重量的严格要求,未来电机控制硬件将更加紧凑,将电机、通信、驱动器、编码器和控制器等集成在一起,形成高度集成的关节模块,减少布线和连接部件,以提高系统的可靠(kào)性(xìng)和(hé)紧(jǐn)凑(còu)性(xìng)。在(zài)这(zhè)个(gè)过(guò)程(chéng)中(zhōng),芯(xīn)片(piàn)是(shì)实(shí)现(xiàn)这(zhè)些(xiē)性(xìng)能(néng)的(de)核(hé)心(xīn)基(jī)础(chǔ),高(gāo)性(xìng)能(néng)的(de)微(wēi)控(kòng)制(zhì)器(qì)(MCU)和数字信号处理器(DSP)等多核异构组合,构成了高性能处理能力与实时控制的硬件架构,能够针对不同的应用场景,赋能相应的 CPU 内核快速处理复杂的电机控制算法,凭借丰富的电机外设,支持高精度的位置、速度和扭矩控制,内置的高速以太网控制器提供确定性的网络通信保障。以上不同的功能特性集成在一颗小小的芯片上,为机器人不同部件的协作、执行任务奠定坚实基础。最后,先进的、小型化的芯片封装技术,也为人形机器人的集成化和小型化设计提供了有力支撑。
在传感技术方面,多模态感知融合是重要的发展趋势。人形机器人将通过融合视觉、触觉、听觉等多种传感器数据,实现更全面的环境感知和理解。不可忽视的是,在这一过程中需要有专用芯片进行信号采集、处理和控制,包括模拟芯片、图像处理芯片、图像传感器芯片等。
人形机器人的发展历经多个阶段,从早期简单的机械构造与基础功能,逐步演进到如今高度智能化、多功能集成的形态。现阶段,全球人形机器人产业已正式步入产业化落地阶段。刘涛指出,从初期来看,人形机器人以基础移动能力为核心研发,关键技术包括动态平衡控制和能耗优化,应用场景主要(yào)集中在物流搬运和巡逻安防。随着技术的不断成熟,人形机器人将逐步(bù)向(xiàng)更(gèng)高(gāo)级(jí)的(de)阶(jiē)段(duàn)迈(mài)进(jìn),感(gǎn)知(zhī)能(néng)力(lì)、认(rèn)知(zhī)能(néng)力(lì)和(hé)交(jiāo)互(hù)能(néng)力(lì)的(de)提(tí)升(shēng)将(jiāng)成(chéng)为(wèi)未(wèi)来(lái)发(fā)展(zhǎn)的(de)重(zhòng)点(diǎn)。在(zài)机(jī)器人逐步升级的过程中,芯片产业也将迎来机遇与挑战。
作为人形机器人的 “大脑”,高性能、低功耗的芯片将是推动其智能化、自主化进程的关键。随着人形机器人对环境感知、决策制定、运动控制等能力需求的日益增长,主控芯片、传感芯片、AI 芯片和边缘计算芯片等的定制化需求会显著增加。与此同时,能源效率成为芯片设计的重要考量因素。鉴于人形机器人需要长时间持续工作,且往往受限于电池容量,因此低功耗设计也将成为人形机器人芯片研发的关键要点。
面对广阔的市场机遇,瑞萨将凭借(jiè)深(shēn)厚(hòu)的(de)技(jì)术(shù)积(jī)累(lèi),特(tè)别(bié)是(shì)在(zài)嵌(qiàn)入(rù)式(shì)处(chù)理(lǐ)、电(diàn)源(yuán)管理和模拟电路方面的专长,开发针对人形机器人特定需求的定制化芯片解决方案。通过优化芯片架构,提升计算效率与能源管理水平,为人形机器人提供持久且高效的动力支持。此外,瑞萨还将加强与机器人制造商、AI 算法开发商及系统集成商的合作,共同推进人形机器人的智能化、自主化进程,确保产品能够契合不断变化的市场需求和行业标准。
相关新闻







联系我们
地址:山东省济南市槐荫区兴福街道齐鲁大道3189号西进时代中心
电话:15898523365
传真:15898523365
邮箱:service@Kaiyun.cco
网址:http://www.rjptj.com

