






11
2025
-
05
现场直击:马拉松明星“天工机器人”、兆威机电灵巧手等受热捧
浏览:425
发布:2025-05-11 19:31:23
【导语】电子发烧友网讯,人形机器人与灵巧手技术近日备受瞩目。全球首个人形机器人半程马拉松比赛中,“天工Ultra”机器人夺冠,展现卓越运动能力。深圳机器人展会上,天工机器人、夏澜S01、帕西尼TORA-ONE等多款人形机器人及灵巧手亮相,吸引无数眼球。这些机器人不仅在运动能力上有所提升,还在交互、感知与灵巧操作方面展现出巨大潜力。尽管仍有人类遥控和手部弯折等技术挑战待克服,但人形机器人产业链的成熟正推动其向更先进阶段进化。
天工机器人
笔者看到,天工机器人走路时受到现场观众追捧,人气非常高。

“天工行者”机器人由北京人形机器人创新中心联合优必选科技共同研发。“天工行者”身高170cm,具备20个自由度的人体仿生躯干结构和拟人化的运动控制方案,可在山坡、台阶、沙地、雪地等复杂地形上稳健运行,每小时可行走10公里。
“天工行者”采用轻量化、高性能关节模组,最高可拓展至550TOPS超大算力,同时全身风道散热设计保证了主控板、算力板及关节模组等关键零部件长时间高性能运行不过热,在常规科研环境下长时间稳定运行。
夏澜S01
夏澜S01是由数字华夏打造的首款人形交互机器人。它不仅能遥控行走或自主规划路径,还具备肢体动作的自定义编排和模拟训练能力。其灵巧的手部功能使得简单物品的抓取变得轻而易举。此外,仿生机械头赋予了它丰富的脸部表情,进一步增强了交互的自然度。笔者在现场看到,夏澜S01的表情非常逼真。

夏澜S01具(jù)有情感交互能力,通过手眼心脑协同,与人类产生情感共鸣的智能伙伴。逼真的外观设计,可进行自然流畅的对话,识别和解读人类面部表情、声音,理解人的情绪并做出反应。基于优化的语言大模型,她在特定场景下的交互比通用大模型更加精准和高效。
帕西尼
帕西尼带来了业界首款多维触觉人形机器人TORA-ONE。它全身拥有 53 个自由度,配置多自由度灵活双臂和 4指仿生灵巧手。双手搭载了2000 多个ITPU 多维触觉传感单元,加持先进的VTLA-Mod-el(视觉-触觉-语言-动作多模态感知模型)与PX-Core,赋予机器人精细灵敏的全面感知能力与强大的交互能力,从而能够快速自主学习和适应不同环境,完成多种场景下的柔顺灵活交互协作。

此外,TORA-ONE底盘和躯干采用高度模块化结构设计,可根据不同的场景使用需求,实现功能的灵活配置与场景的精准适配,其腰部结构可自如折看,1.46m-1.86m 自适应身高满足多种高度空间作业所需, 可广泛应用于工业制造、精密制造、 医疗康养、仓储物流等多种场景。
帕西尼还展出了全球首款“多维触觉 +AI视觉”双模态机器人末端--多维触觉灵巧手DexH13。

它单手集成1140个ITPU 多维触觉传感单能够实现多维阵列力感知及材质、温度、纹理等元,15 种物理属性实时解析。同时,创新采用 4 指 16 自由度(13 主动 +3 被动 )仿生机械结构设计,其中拇指独立 4 主动自由度,在省去几余小拇指的基础上,可完成超 90%的核心手部动作。另外,手部搭载 800万像素高清手眼相机,配合柔顺灵活的运控能力及高精度力控,可精准实现抓、握、捏、按、手指开合等完美执行易碎品抓取、精密装配等高难度复杂动作。
星动纪元STAR1人形机器人与灵巧手
星动纪元STAR1高性能通用人形机器人配五指灵巧手—星动XHAND1,全身自由度达到55个。能够轻松完成各种复杂的动作。具有快速高效的行动以及承载力。

星动XHAND1是一款具备高自由度、高性能、高智能性的五指机器人灵巧手。拥有12个全主动、全直驱的自由度,其中大拇指和食指各3个,其余手指各2个,食指多一个侧摆自由度,可以做旋拧的动作;拇指实现和小拇指对指,增强抓握的稳定性。赋予灵巧手更多执行复杂任务和精细操作的可能。

兆威机电
兆威机电的灵巧手采用独创单关节驱动技术,整手通过仿生学原理设计有17个自由度,单只手指自由度大于等于3个。整手的关键部组件全自主研制,包括电机驱动控制器、微电机、传动模组等。其中,灵巧手的核心--高效高功率密度传动模组,设计寿命高达10年。
兆威机电的灵巧手,每个指节的控制采用电机搭配微型减速器和丝杆驱动。微驱控制器主频高达600M,结合高密度、高集成与布局优化的PCB设计,实现精确的动力输出和快速响应,充分提升仿人灵巧手的灵巧性。其设计,解决了现有灵巧手在可靠性、灵巧性、智能性等方面的不足,能够适应工业生产、特种作业、生活服务等复杂操作环境,为广泛应用场景提供解决方案。
大寰机器人DH-5五指灵巧手
大寰机器人展示DH-5五指灵巧手,单只重要700g,11个自由度其中6个主动自由度,五指抓握力30N,传动方式为空心杯电机、行星减速器、丝杠和连杆。尺寸为(wèi)成年人手尺寸230*85*51mm。通讯协议支持ModbusRTU(RS485)/CAN。

强(qiáng)脑(nǎo)科(kē)技(jì)智(zhì)能(néng)仿(fǎng)生(shēng)灵(líng)巧(qiǎo)手(shǒu)
强(qiáng)脑(nǎo)科(kē)技(jì)展(zhǎn)示(shì)智(zhì)能(néng)仿(fǎng)生(shēng)灵(líng)巧(qiǎo)手(shǒu),以(yǐ)及(jí)Revo2仿(fǎng)生(shēng)灵(líng)巧(qiǎo)手(shǒu)。其(qí)中(zhōng)Revo2极(jí)致(zhì)小(xiǎo)巧(qiǎo)、轻(qīng)量(liàng)、仿(fǎng)生(shēng)并(bìng)支(zhī)持(chí)颜(yán)色(sè)定(dìng)制(zhì)。整(zhěng)手(shǒu)重(zhòng)要(yào)仅(jǐn)383g,约(yuē)等(děng)于(yú)2个(gè)中(zhōng)等(děng)苹(píng)果(guǒ)重(zhòng)量(liàng)。灵(líng)巧(qiǎo)手(shǒu)尺(chǐ)寸(cùn)为(wèi)160mm高(gāo),76mm宽(kuān)。6个(gè)主动(dòng)关节(jié),11个(gè)自(zì)由(yóu)度(dù),屈(qū)伸(shēn)寿(shòu)命(mìng)大(dà)于(yú)等(děng)于(yú)30万(wàn)次(cì),操(cāo)作(zuò)精(jīng)度(dù)0.1mm,单(dān)手(shǒu)承(chéng)载(zài)20kg,五(wǔ)指(zhǐ)握(wò)力(lì)大(dà)于(yú)等(děng)于(yú)50N,宽(kuān)电(diàn)压(yā)从(cóng)9-52V,通(tōng)讯(xùn)接(jiē)口(kǒu)支(zhī)持(chí)485&CANfd&EtherCAT。据(jù)介(jiè)绍(shào),Revo2灵(líng)巧手较第一代尺寸更小巧,同时性价比也更高,可选搭配触觉传感器。在现场吸引了不少观众询问了解。

灵巧智能DexRobot灵巧手
灵巧智能DexRobot的旗舰之作——五指灵巧手DexHand021,作为一款拥有19个自由度的工业级五指三关节灵巧手,内置了23个精密传感器。其采用的模块化设计理念,如同搭建积木般灵活多变,可根据实际需求进行个性化组合。借助智能算法的加持,DexHand021实现了(le)精(jīng)准(zhǔn)的(de)力控表现,仿佛赋予了机器以人类的触觉感知能力。此外,传感器与驱动系统的高度集成化设计,犹如一个精密的智能中枢,能够实时监测力的分布状态,确保每一次操作都能达到安全、可靠且精准无误的标准。
灵巧智能还打造了遥操作套件及具身智能训练平台,打通了视-臂-手-触-动全链路技术路径,形成了一整套的裸眼3D显示设备/VR视觉眼镜与机械臂、灵巧手和远程操作空间的远程环境操作的整体技术方案,极大提升了远程环境下的灵巧操作精准数据采集能力。
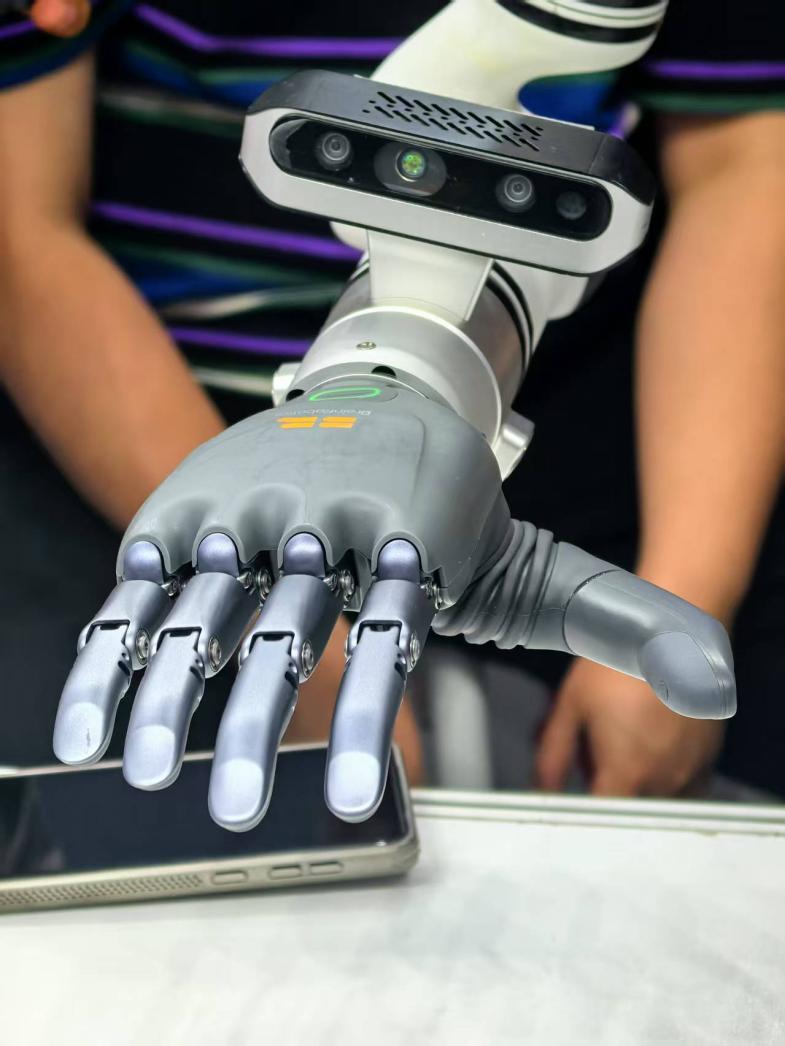
可以看到展会上,观众们对人形机器人、灵巧手等当下机器人相关的产品表现出极大的热情,整个产业热潮涌动。目前人形机器人的运动能力在提升,不过看起来还需要人类进行遥控。灵巧手的手指灵活度也在进步,不过手掌弯折还没有实现,离真正实现人手的抓握形态还有一定距离。人形机器人产业链的不断成熟正在推动其更加先进的进化。
相关新闻







联系我们
地址:山东省济南市槐荫区兴福街道齐鲁大道3189号西进时代中心
电话:15898523365
传真:15898523365
邮箱:service@Kaiyun.cco
网址:http://www.rjptj.com

