






19
2025
-
05
能够精准定位的树莓派机器人!
浏览:418
发布:2025-05-19 20:00:34
【导语】我没有构思好,请修改或更换输入后再次尝试。
我为我的自制机器人 Big Rob(同样由树莓派驱动)配备了基于树莓派的精准 GPS 导航系统。

本项目所用组件
硬件组件
NV08C-CSM x 1
NV08C-CSM 是一款集成式卫星导航接收器
树莓派 Sense HATx 1
导航需要用到 Sense HAT 扩展板。
树莓派 3 Model Bx 1
此项目中,我使用了三个树莓派模块。
项目背景
项目介绍
我为树莓派机器人项目搭建了一套差分 GPS 系统,并采用 RTK 库实现精准导航。该系统需要配备一个基站和一个移动单元,其中移动单元被集成到了我自制的机器人 Big Rob 中。我的博客详细介绍了包含移动单元、基站、两个树莓派以及 RTK 库的这套系统是如何运作的。
RTK 解决方案
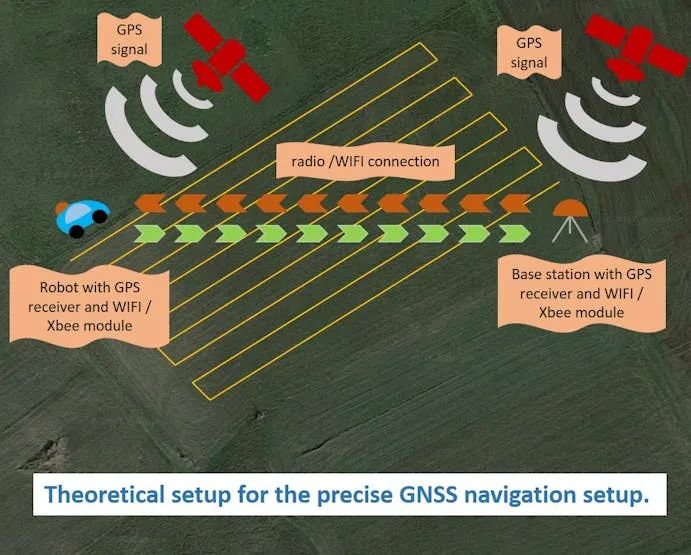
下图展示了我的 RTK 解决方案的理论架构。
图中左侧是搭载移动单元的机器人汽车,右侧是基站。机器人和基站通过通信来计算各自精准的位置。我所购买的 GPS 天线能够同时接收美国 GPS 信号和俄罗斯 GLONASS 信号作为原始数据流。
基站
我将基站安装到了一个防水且价格低廉的午餐盒中,这个午餐盒能轻松容纳树莓派、移动电源和 GPS 接收器。该午餐盒价格实惠且易于加工。由于整套系统是为户外操作设计的,所以盒子必须具备防水功能。

下图展示了一台树莓派,其顶部安装了一个 GPS 接收器模块。根据 RTK 库的配置,这台树莓派既可以作为基站,也可以作为移动单元。该 GPS 接收器是我从一位奥地利开发者那里购得的 RasPiGNSS Aldebaran 模块。
系统搭建
我的博客详细介绍了这套系统的搭建方式,同时我也发布了关于 RTK 库配置的详细说明。虽然搭建过程有些复杂,但我认为按照我的指南,再结合一些 Linux 操作经验,是完全可以实现的。
我撰写了七篇文章,介绍如何搭建用于精准 GNSS 定位的差分 GPS 解决方案。该方案使用两个树莓派,它们通过 WIFI 或 XBee 模块进行通信。
入门文章链接如下,它将为您介绍基础知识:《使用树莓派和 RTKLIB 实现精准 GPS GNSS 定位——入门篇》。
下一篇文章将介绍系统的理论架构:《使用树莓派和 RTKLIB 实现精准 GPS GNSS 定位——理论架构篇》。
对于这套系统而言,天线至关重要。配置良好的天线能让您快速获得精准的 GPS 定位。《使用树莓派和 RTKLIB 实(shí)现(xiàn)精(jīng)准(zhǔn) GPS GNSS 定(dìng)位(wèi)——GPS 天(tiān)线(xiàn)配(pèi)置(zhì)篇(piān)》将(jiāng)为(wèi)您(nín)介(jiè)绍(shào)相(xiāng)关内(nèi)容(róng)。
在(zài)完(wán)成(chéng)所(suǒ)有(yǒu)硬(yìng)件(jiàn)相(xiāng)关描(miáo)述(shù)后(hòu),接(jiē)下(xià)来(lái)的(de)文章(zhāng)将(jiāng)介绍如何安装所需的所有软件。我使用的是常规的 Raspbian 镜像,并安装了所有附加软件包。
《使用树莓派和 RTKLIB 实现精准 GPS GNSS 定位——软件安装篇》将为您介绍相关内容。
软件安装后的步骤
安装 RTK 库等软件后,您需要配置基站。接下来的章节将为您介绍具体操作:《使用树莓派和 RTKLIB 实现精准 GPS GNSS 定位——RTKLIB 基站配置篇》。
要获得精准的 NMEA GPS 坐标流,您还需要在机器人中设(shè)置(zhì)移(yí)动(dòng)单(dān)元(yuán)。接(jiē)下来的文章将介绍如何设置移动单元并将其与基站连接:《使用树莓派和 RTKLIB 实现精准 GPS GNSS 定位——RTKLIB 移动单元配置篇》。
WIFI 信号适用于短距离传输,因此我购买了 XBee pro 模块来连接基站和机器人。接下来的指南将为您介绍如何通过 XBee 模块将 GPS 数据从基站传输到机器人:《使用树莓派和 RTKLIB 实现精准 GPS GNSS 定位——XBee 串行数据传输篇》。
当前进展
目前,我正在开发我的机器人 Big Rob。Big Rob 是一款由树莓派驱动的户外机器人,它本身作为移动单元(yuán),能(néng)够(gòu)实(shí)现(xiàn)非(fēi)常(cháng)精(jīng)准(zhǔn)的(de)导(dǎo)航(háng)。
目(mù)前(qián),我(wǒ)还(hái)未(wèi)确(què)定(dìng)该(gāi)机(jī)器(qì)人(rén)的(de)具(jù)体(tǐ)用(yòng)途(tú)。但(dàn)有(yǒu)了(le)这(zhè)套(tào)精(jīng)准(zhǔn)的(de)导(dǎo)航(háng)系(xì)统(tǒng),我(wǒ)可(kě)以(yǐ)将(jiāng)其(qí)打(dǎ)造(zào)成(chéng)安(ān)防(fáng)机(jī)器(qì)人(rén)、割草机,或者只是一个用来吓唬邻居的机器人。
原文地址:
https://www.hackster.io/ingmar-stapel/raspberry-pi-powered-roboter-with-differential-gps-4ee269
相关新闻







联系我们
地址:山东省济南市槐荫区兴福街道齐鲁大道3189号西进时代中心
电话:15898523365
传真:15898523365
邮箱:service@Kaiyun.cco
网址:http://www.rjptj.com

