






22
2025
-
05
从“单脑”到“双脑”:具身智能机器人迈向L4时代的核心架构革新
浏览:410
发布:2025-05-22 18:00:51
【导语】随着2025年《政府工作报告》明确提出“建立未来产业投入增长机制”,具身智能被列为国家重点培育的未来产业之(zhī)一(yī)。在(zài)国(guó)家(jiā)战(zhàn)略(è)与(yǔ)技(jì)术(shù)的(de)双(shuāng)重(zhòng)驱(qū)动下,具身机器人行业正(zhèng)迎(yíng)来从“实验室探索”到“场景落地”的关键转折,迈向L4级智能化成为行业发展新方向。然而,如何实现机器人“大脑”与“小脑”的协同,成为制约行业发展的关键难题。阿普奇公司凭借其KiWiBot系列控制器,以“感知大脑+运控小脑”双域融合架构,为破解这一难题提供了创新方案,推动了具身机器人技术的跃迁与广泛应用。
2025年全国《政府工作报告》首次提出“建立未来产业投入增长机制”,将具身智能与生物制造、量子科技等并列为重点培(péi)育(yù)的(de)未(wèi)来(lái)产(chǎn)业(yè)。在(zài)国(guó)家(jiā)战(zhàn)略(è)驱(qū)动(dòng)下(xià),多(duō)城(chéng)市(shì)“领(lǐng)跑(pǎo)”具(jù)身(shēn)智(zhì)能(néng)赛(sài)道(dào),北(běi)京(jīng)、上(shàng)海(hǎi)、深(shēn)圳(zhèn)、广(guǎng)东(dōng)、浙(zhè)江(jiāng)、安(ān)徽(huī)等(děng)20余(yú)省(shěng)市(shì)已(yǐ)将(jiāng)具(jù)身(shēn)智(zhì)能(néng)写(xiě)入(rù)地(de)方政府工作报告,并出台行动计划。这一系列政策信号释放了国家对具身智能产业发展的高度重视,为行业发展注入了强劲动力。2024年世界机器人大会上发布的《人形机器人十大趋势展望》指出,具身智能是可以在高变化下做出迅猛、精准反应的高质量、高性能智能系统。随着技术的不断突破和产业生态的逐步完善,具身机(jī)器(qì)人(rén)正(zhèng)加(jiā)速从实验(yàn)室(shì)走(zǒu)向(xiàng)现实应用场景,成为现代化产业体系建设的重要力量。
在政策与技术的双重驱动下,具身机器人行业正经历从“实验室探索”到“场景落地”的关键转折,迈向L4级智能化成为当前行业的重要发展方向。然而,随着机器人智能化层级从L3(条件自主)向L4(高度自主)过渡,其核心矛盾愈发凸显——如何让机器人像人类一样,既拥有“思考”的大脑,又具备“执行”的小脑?
行业痛点:从L0到L5,智能化跃迁的终极挑战
具身机器人的自主能力分为六个层级:
L0(无自主性):仅能依靠人类指令实现结构驱动,无任何智能化设计,如早期工业机械臂;
L1(辅助控(kòng)制(zhì)):可(kě)以驱动关节实现拖拽、录制、回放等功能;
L2(部分自主):在算法的驱动下规划运动轨迹和路径,完成特定动作;
L3(条件自主):具备感知能力,利用传感器获取环境信息,能够自主识别、理解和反馈预设动作,但仍需人类监控;
L4(高度自主):具备一定认知,能够通过观察、测量、预设等方式自主推理,完成任务,不需要人的频繁干预;
L5(完全自主):完全具备人类的思维和创造力,能够自主判断,做出决策并执行复杂任务;
当前,具身机器人行业正处于L3向L4过渡的关键阶段,核心矛盾集中在感知与决策的深度协同:机器人需同时处理多模态数据(视觉、语音、点云)并实现毫秒级运动控制,传统单域控制器(如纯AI算力或纯运控方案)难以兼顾算力与实时性。
技术跃迁:从“单脑”到“双脑”,人形机器人的核心架构革新
在L4级智能化中,人形机器人需模仿人类的“大脑”与“小脑”协同机制:
● “大脑”:负责自然交互、意图理解、分层规划与错误反思,依赖高算力支持大模型推理(如解析用户指令“请整理桌面”并拆解为子任务);
● “小脑”:承担全身协调、稳定行走、技能拆解与动态纠错,需高实时性控制(如双臂协作抓取物体时避免碰撞)。
即对多模态感知的算力需求与运动控制的实时性要求。但传统方案常顾此失(shī)彼(bǐ)——纯(chún)AI算(suàn)力(lì)平(píng)台(tái)难(nán)以(yǐ)支(zhī)撑(chēng)高(gāo)精(jīng)度(dù)运(yùn)动(dòng),而(ér)实(shí)时(shí)运(yùn)控(kòng)系(xì)统(tǒng)又(yòu)缺(quē)乏(fá)环(huán)境(jìng)理(lǐ)解(jiě)能(néng)力(lì)。因(yīn)此(cǐ),如(rú)何(hé)让(ràng)机(jī)器(qì)人(rén)像(xiàng)人(rén)类(lèi)一(yī)样,既拥有“思考”的(de)大(dà)脑(nǎo),又(yòu)具(jù)备(bèi)“执(zhí)行(xíng)”的(de)小脑?成为行业重点关注的议题。
阿普奇答案:KiWiBot系列具身智能机器人“核心大小脑”控制器
基于具身机器人“大脑+小脑”核心需求,阿普奇KiWiBot系列控制器,以“感知大脑+运控小脑”双域融合架构逐一击破行(xíng)业(yè)瓶(píng)颈(jǐng):
1、高(gāo)性(xìng)能(néng):兼(jiān)顾(gù)AI推(tuī)理(lǐ)与(yǔ)实(shí)时(shí)运(yùn)控(kòng)
·大(dà)脑(nǎo)(Jetson平(píng)台(tái)):提(tí)供(gōng)275TOPS+算(suàn)力(lì),支(zhī)持(chí)视(shì)觉(jué)、语(yǔ)音(yīn)、点(diǎn)云(yún)等(děng)多(duō)模(mó)态(tài)数(shù)据(jù)处(chù)理(lǐ),满(mǎn)足(zú)大(dà)模(mó)型(xíng)实时推理需求。
·小脑(X86平台):采用Intel移动处理器,优化BIOS中断调度模型,实现70轴协同控制、1000Hz运控节拍与35μs指令抖动,解决传统EtherCAT网络200ms抖动的行业难题。
2、高可靠:极端环境下的稳定运(yùn)行(xíng)
·准(zhǔn)车(chē)规级测试体系:通过23类1000+项测试,包括功能性测试、兼容性测试、环境可靠性测试,电磁兼容性测试,安全测试,法规合规性测试等。
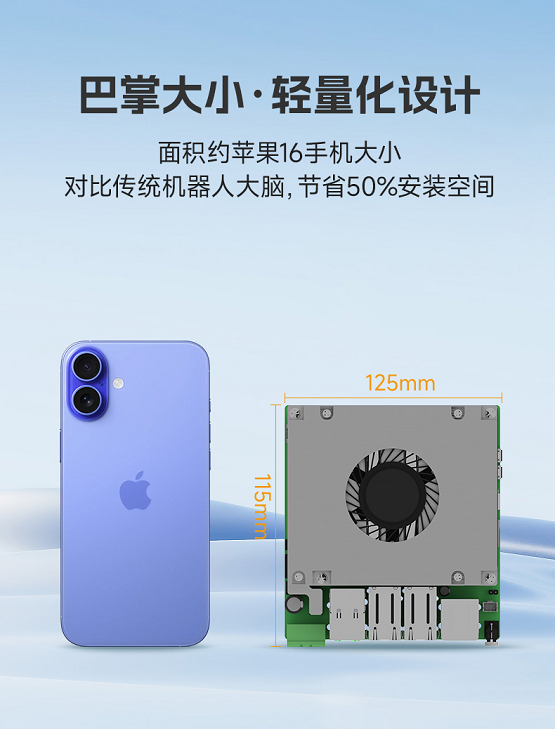
·三防设计+智能散热:主板三防涂层抵御腐蚀与震动,嵌入式散热方案在同等性能下大大减少,适配人形机器人紧凑结构。
3、多场景适用
·服务机器人:如家庭陪伴机器人、酒店服务机器人,依赖AI算力实现语音识别、人脸识别等功能。
·工业机器人:如仓储物流机器人,需要高性能实时控制和路径规划能力。
·特种机器人:如救援机器人、巡检机器人,适应复杂环境下的高可靠性和宽温工作需求。
在具身机器人从“工具”迈向“伙伴”的进程中,阿普奇以KiWiBot系列重新定义了控制器的技术边界。“双脑协同”架构不仅破解了L3向L4落地的核心矛盾,更以模块化、高可靠的特性推动机器人从“工业专用”走向“消费普惠”。
相关新闻







联系我们
地址:山东省济南市槐荫区兴福街道齐鲁大道3189号西进时代中心
电话:15898523365
传真:15898523365
邮箱:service@Kaiyun.cco
网址:http://www.rjptj.com

