






14
2025
-
01
发那科ROBOGUIDE机器人仿真助手入门
浏览:538
发布:2025-01-14 13:31:10
发那科ROBOGUIDE
是一款强大的机器人仿真助手
专门为发那科机器人设计
本文给大家分享一下
ROBOGUIDE入门-创建项目
在开始(shǐ)操(cāo)作(zuò)前(qián)
要(yào)先(xiān)安(ān)装(zhuāng)好(hǎo)ROBOGUIDE软(ruǎn)件(jiàn)
ROBOGUIDE创(chuàng)建(jiàn)项(xiàng)目(mù)
创(chuàng)建(jiàn)流(liú)程(chéng):
01打(dǎ)开(kāi)ROBOGUIDE
02进(jìn)入(rù)工(gōng)作(zuò)单(dān)元(yuán)创(chuàng)建(jiàn)向(xiàng)导(dǎo)
03等(děng)待(dài)软件生成,完成创建
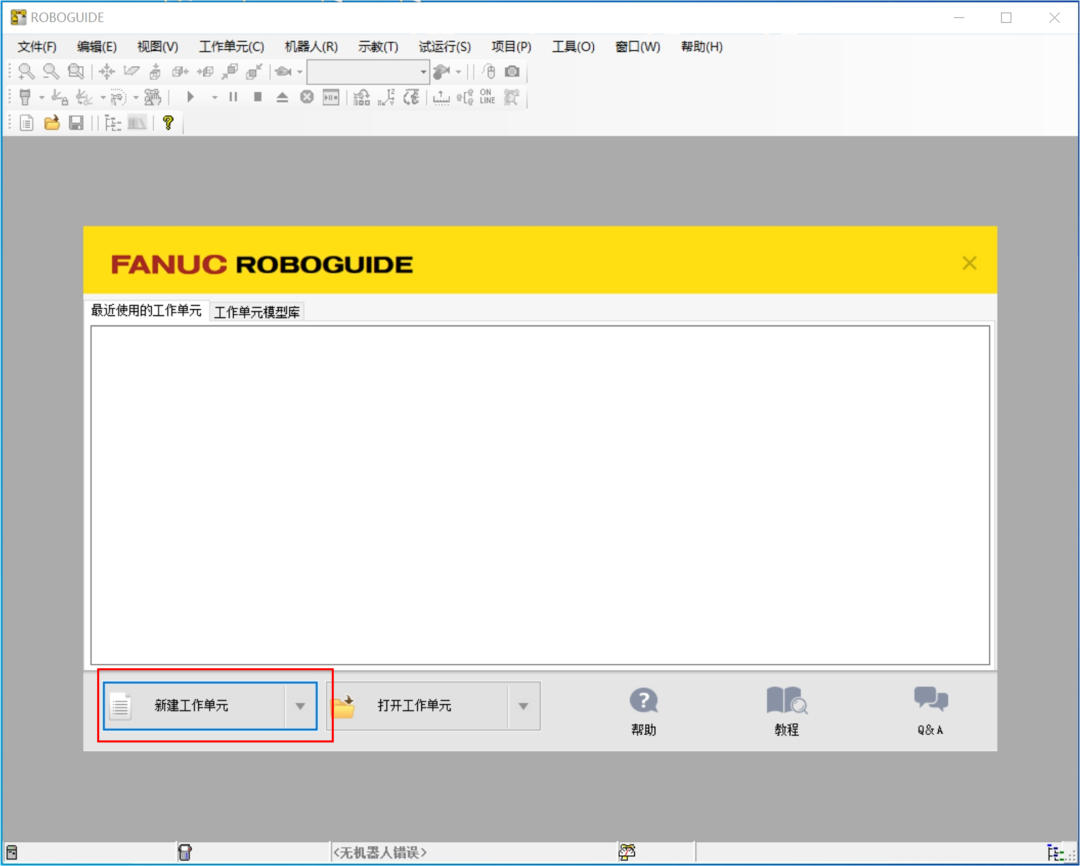
01打开ROBOGUIDE
打(dǎ)开(kāi)软(ruǎn)件(jiàn)后(hòu),如(rú)下(xià)图(tú)所(suǒ)示(shì)。然(rán)后(hòu)点(diǎn)击(jī)新(xīn)建(jiàn)工(gōng)作(zuò)单(dān)元(yuán)
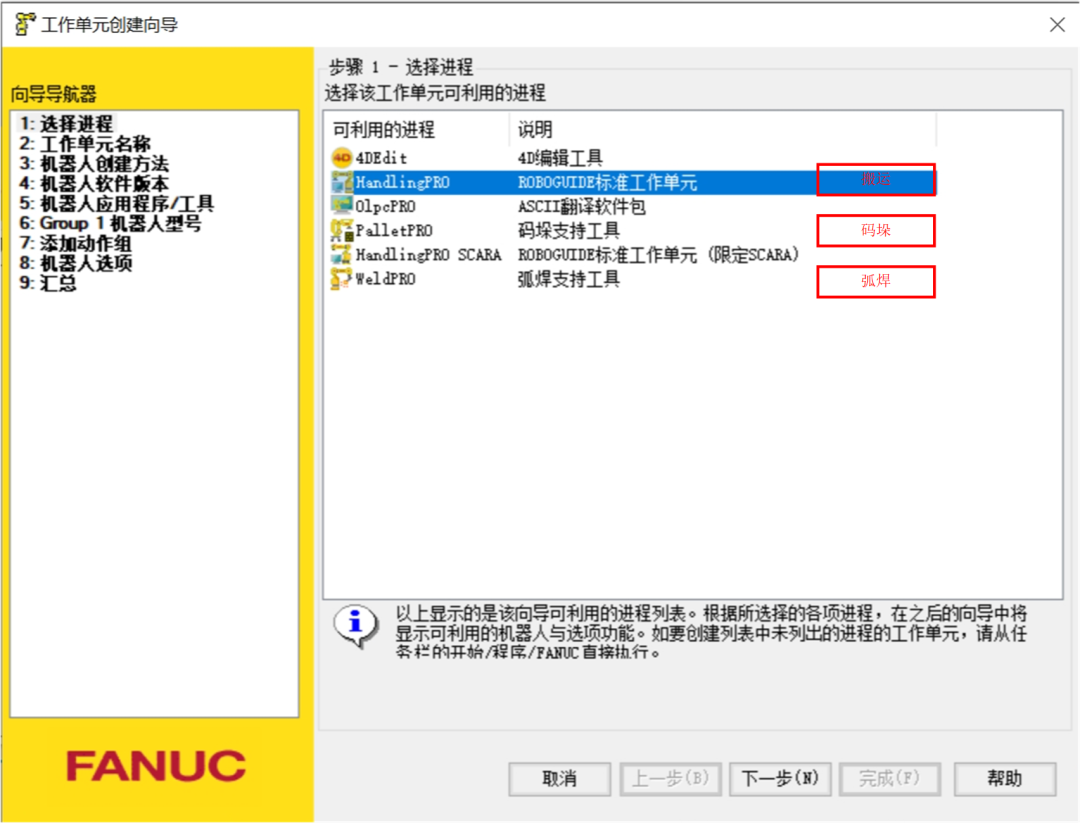
02进(jìn)入(rù)工(gōng)作(zuò)单(dān)元(yuán)创(chuàng)建(jiàn)向(xiàng)导(dǎo)
2.1 在工作单元创建向导,选择“HandlingPRO”,即搬运工具(本例以搬运机器人进行举例说明),点击下一步;
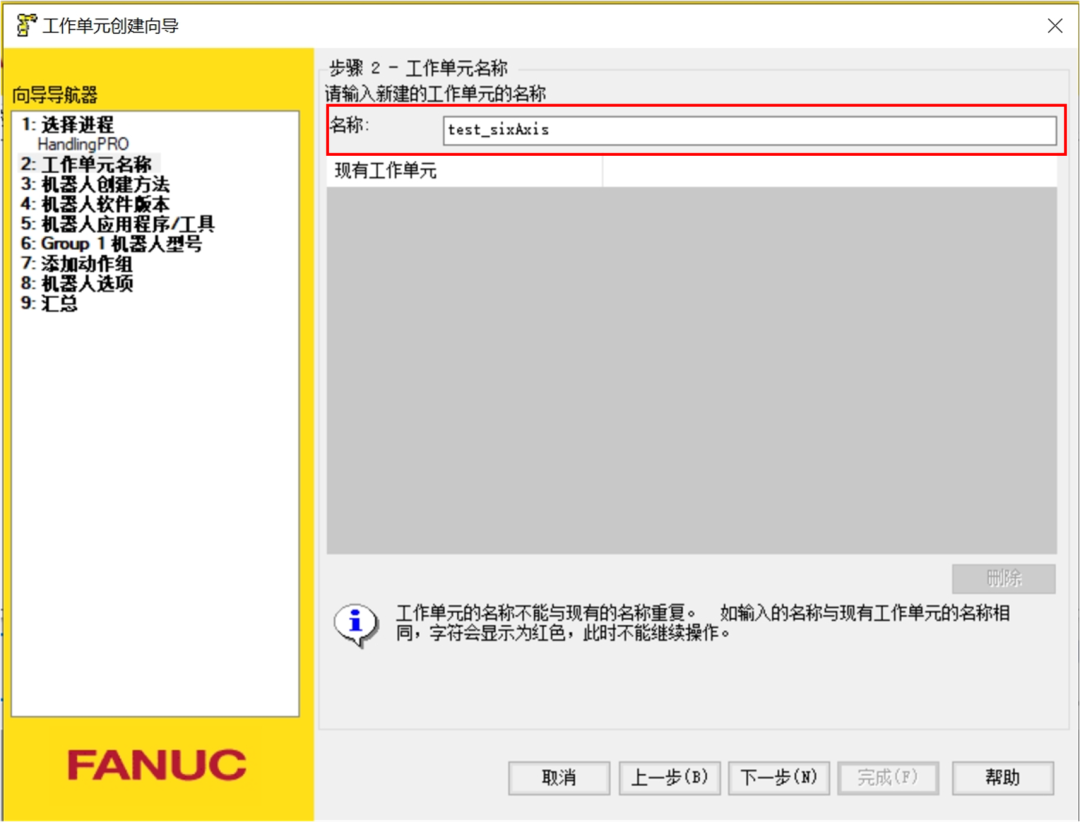
2.2 如下图所示,设置工作单元的名称,点击下一步;
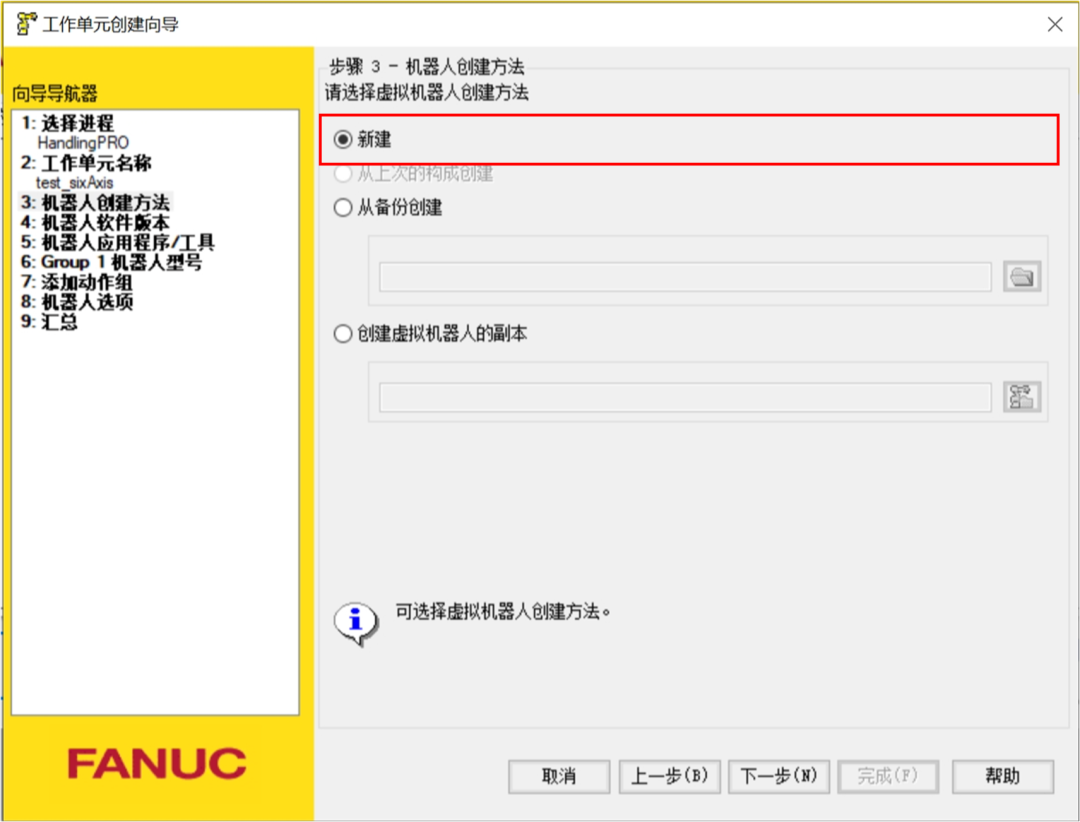
2.3 机器人的创建方法,选择新建,点击下一步;
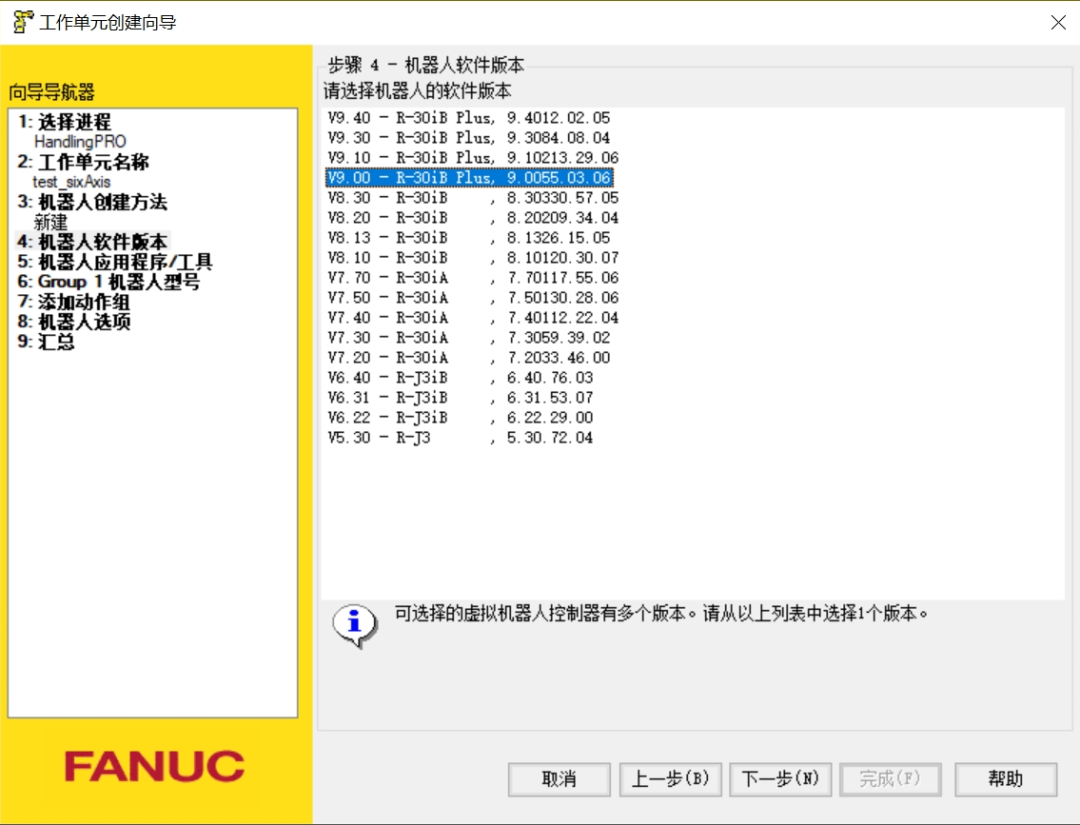
2.4 选择机(jī)器(qì)人(rén)软(ruǎn)件(jiàn)版(bǎn)本(běn)(一(yī)般(bān)选(xuǎn)择(zé)最(zuì)高(gāo)版(bǎn)本(běn)),这(zhè)里(lǐ)以(yǐ)V9.00-R-30iB Plus为(wèi)例(lì),点(diǎn)击(jī)下(xià)一(yī)步(bù);
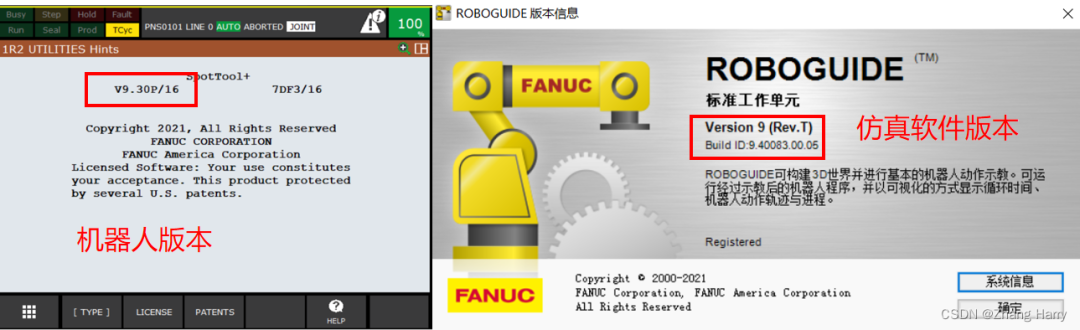
注(zhù):软(ruǎn)件(jiàn)版(bǎn)本(běn)需(xū)要(yào)与(yǔ)现(xiàn)场(chǎng)机(jī)器(qì)人(rén)对(duì)应(yīng),如(rú)果(guǒ)想(xiǎng)直(zhí)接(jiē)导(dǎo)入(rù)现(xiàn)场(chǎng)机(jī)器(qì)人(rén)的(de)备(bèi)份(fèn)来(lái)生(shēng)成(chéng)一(yī)个(gè)仿(fǎng)真(zhēn)机(jī)器(qì)人(rén),必(bì)须(xū)要(yào)Roboguide软(ruǎn)件(jiàn)版(bǎn)本(běn)不(bù)低(dī)于(yú)现(xiàn)场(chǎng)机(jī)器(qì)人(rén)版(bǎn)本(běn)。比(bǐ)如(rú)V9.3、V9.4版(bǎn)本的软件可以打开V9.3机器人的备份,V9.1就不行。
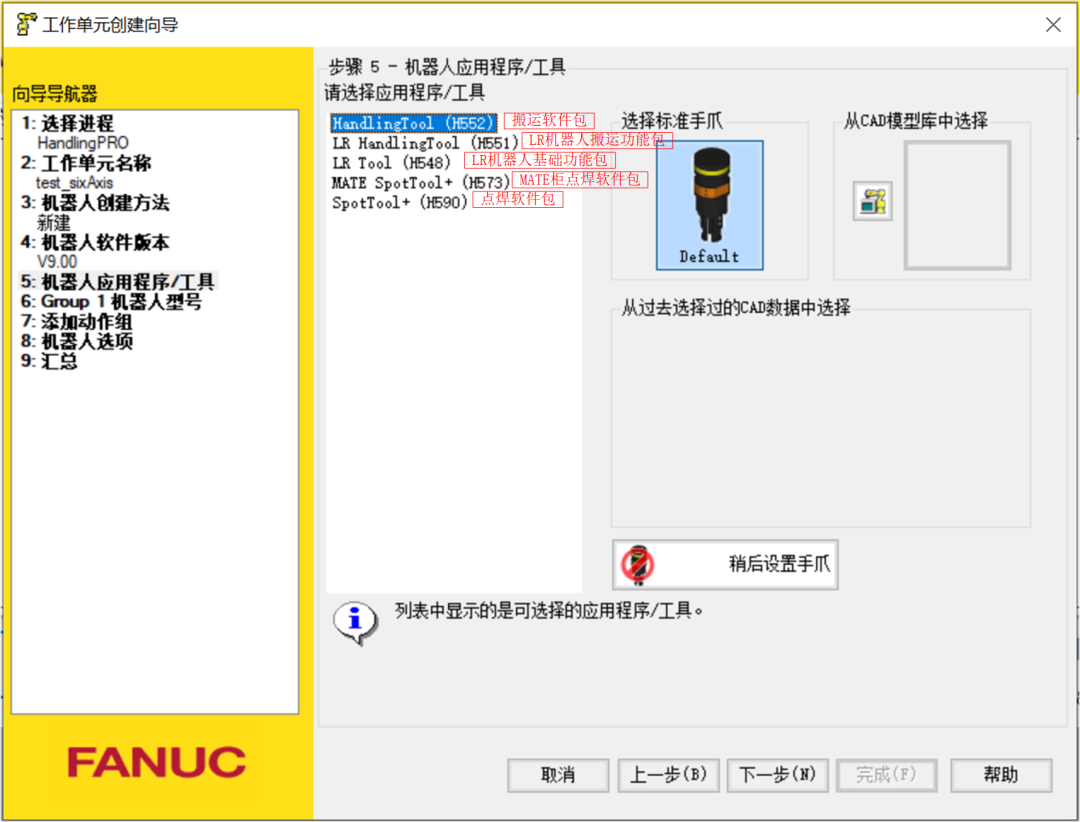
2.5 选择机器人应用程序,本文为搬运,所以选择搬运软件包,点击下一步;
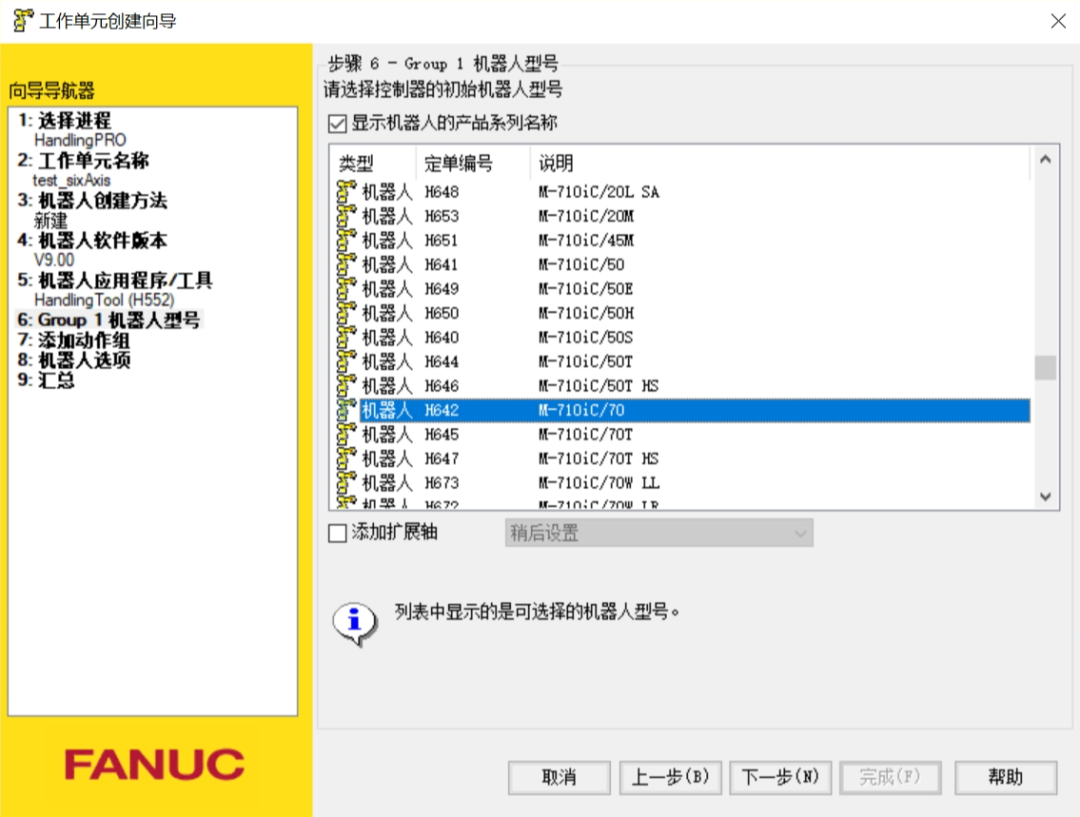
2.6 选择机器人型号(如果选型错误,可以在创建之后再更改),本文选择H642,点击下一步;
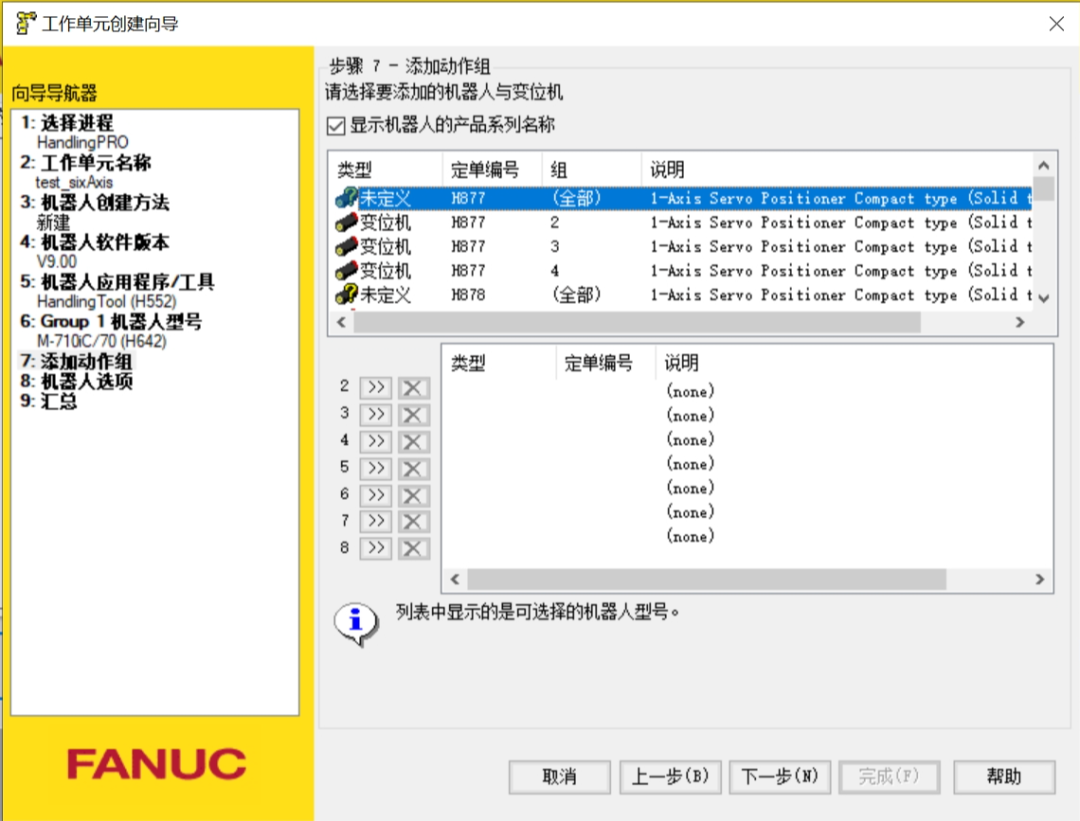
2.7 添加动作组,本文选择未定义H877,点击下一步;
添加完机器人本体后可以添加附加设备。可以选择在同一控制柜中继续添加额外的机器人(也可在建立Workcell之后添加),还可添加Group2~8的设备,如变位机等。
注意:
1.在添加Group2~8内的设备时需要依次添加,不能跳组;
2.在列表中选择变位机等设备时,设备信息中带有添加组限制的只能添加在限制的对应组内;
2.8 进(jìn)行机器人选项:软件选项、语言、详细设置,点击下一步;
添加各种应用类型内的软件功能,将它们用于仿真,添加较多的功能应用是搬运中的附加轴控制、码垛、点焊中(zhōng)的(de)伺(cì)服(fú)枪(qiāng)设置、弧焊中的协同等。
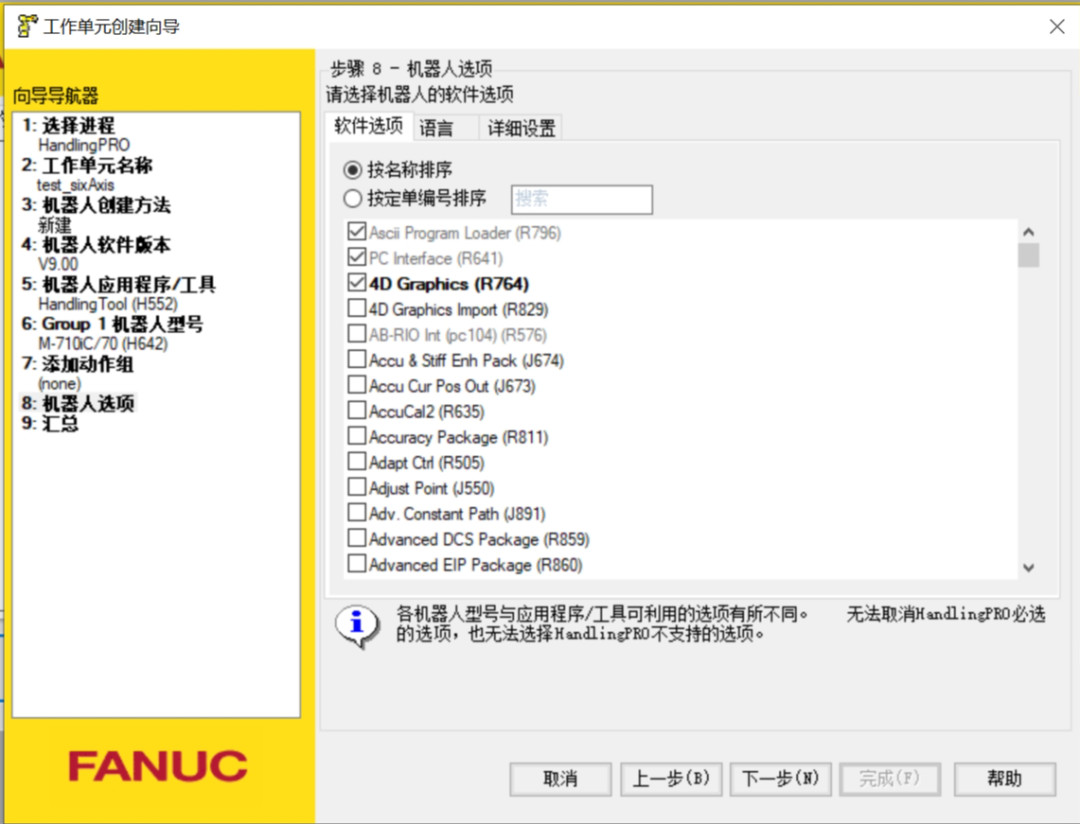
软件选项–4D Graphics(R764)
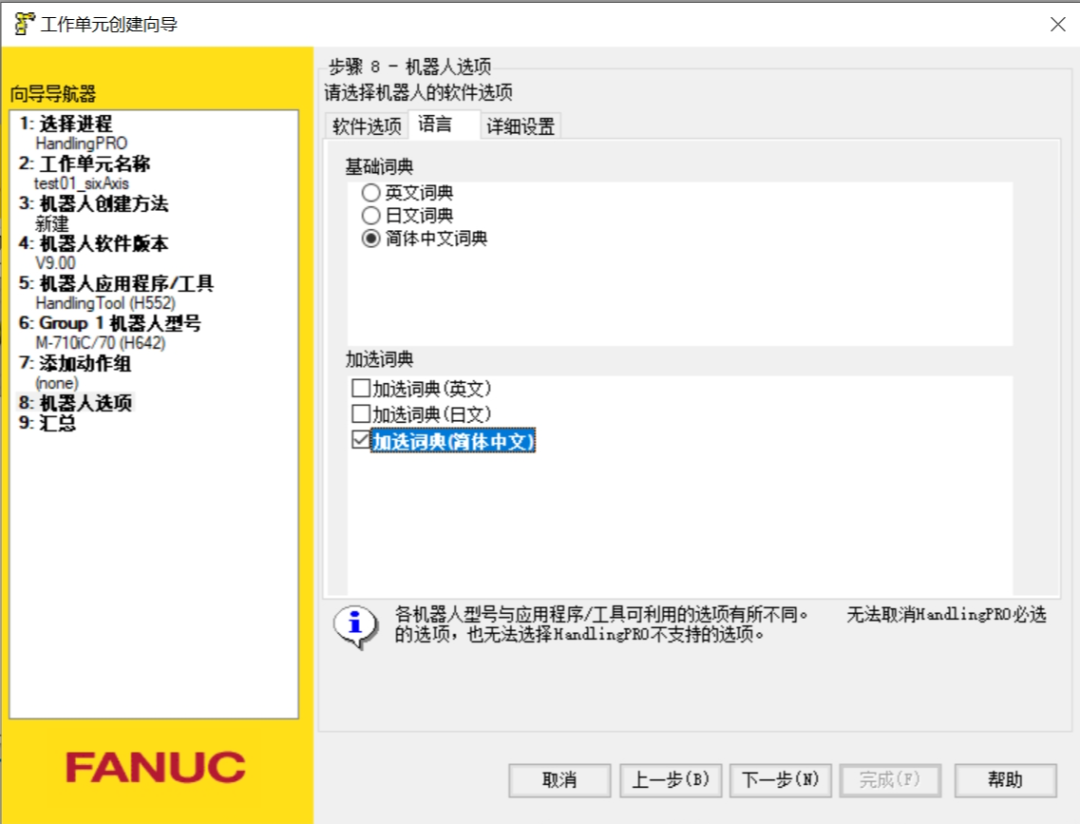
语言–加选词典(简体中文)
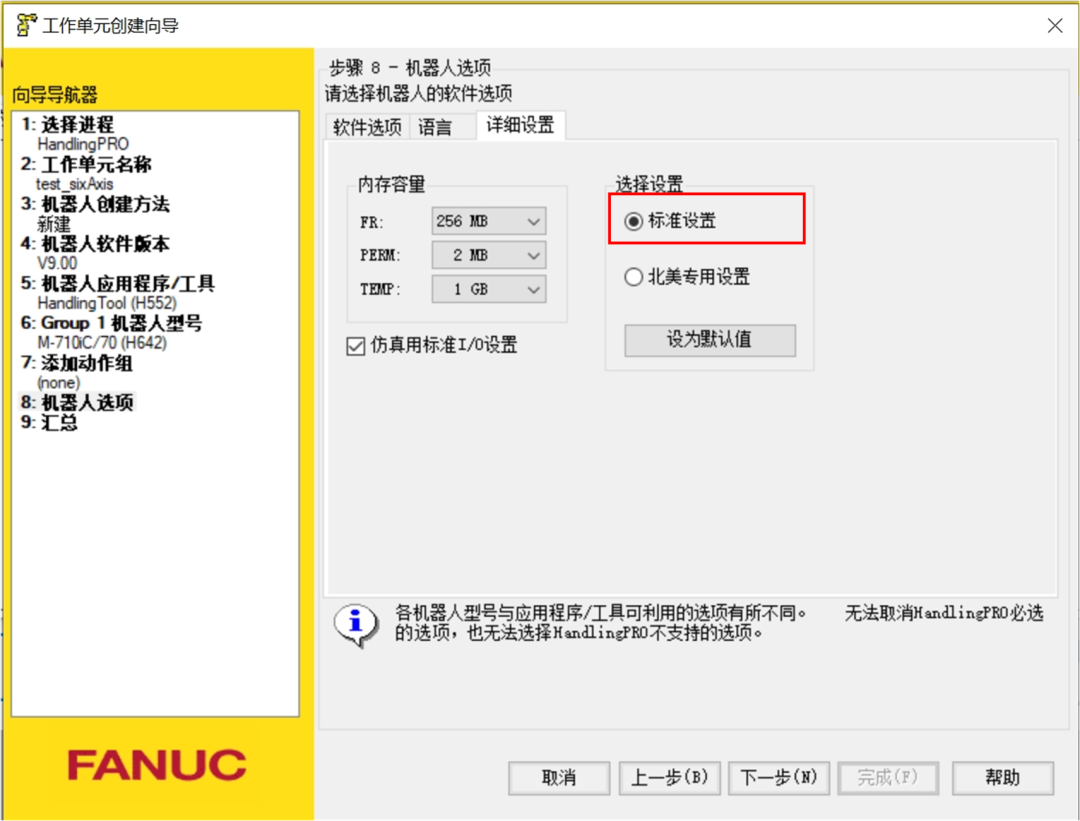
详细设置–标准设置
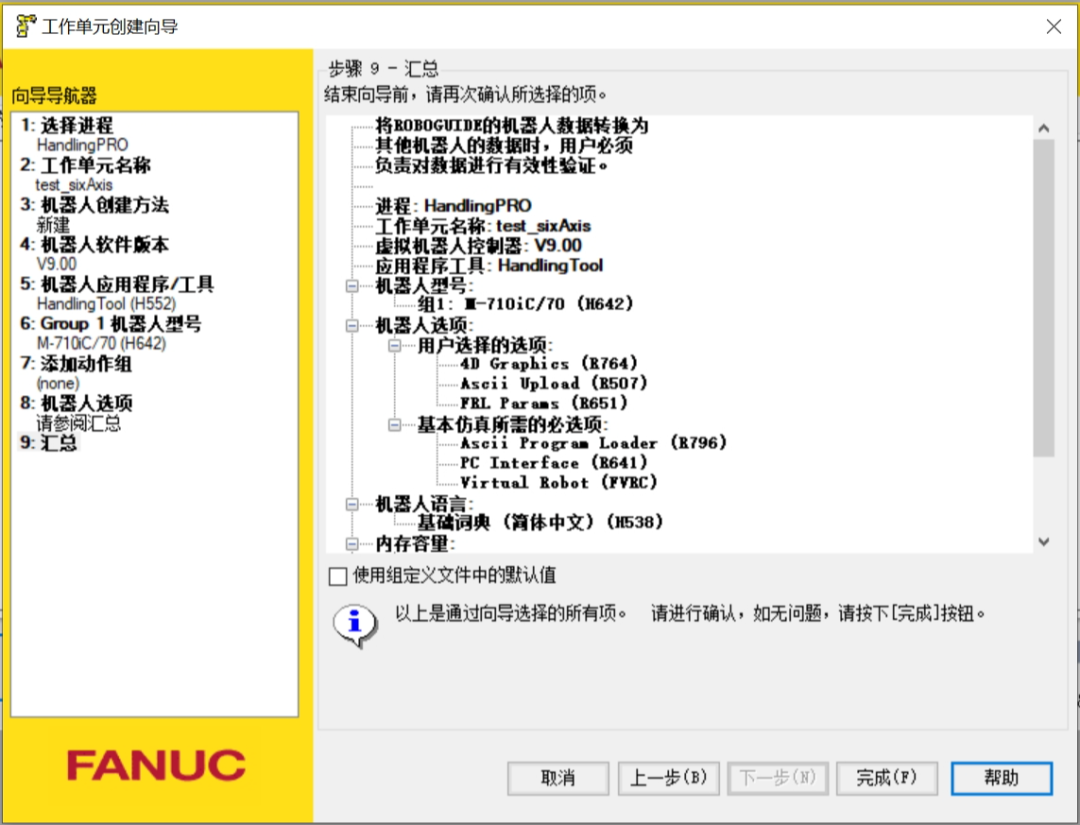
2.9 汇总,显示当前设置和选择的所有参数,点(diǎn)击(jī)完(wán)成(chéng);
03等(děng)待(dài)软(ruǎn)件(jiàn)生(shēng)成(chéng),完(wán)成(chéng)创(chuàng)建(jiàn)
等待软件生成
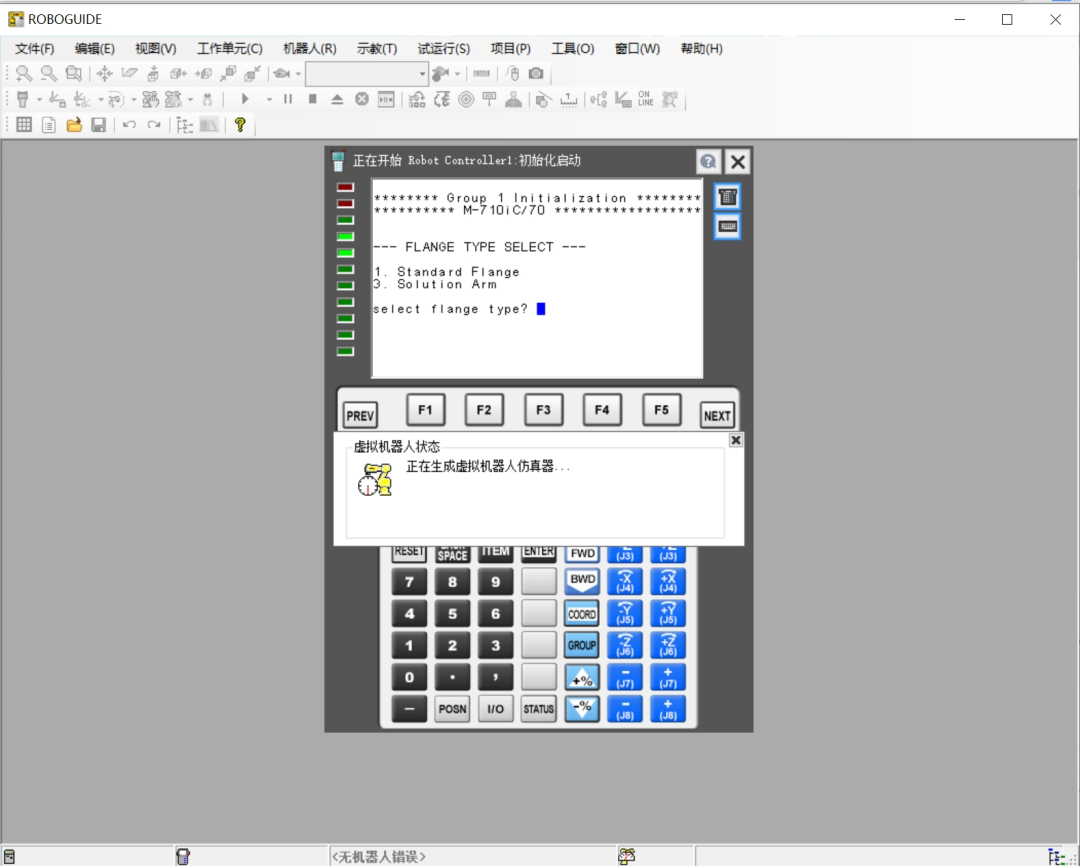
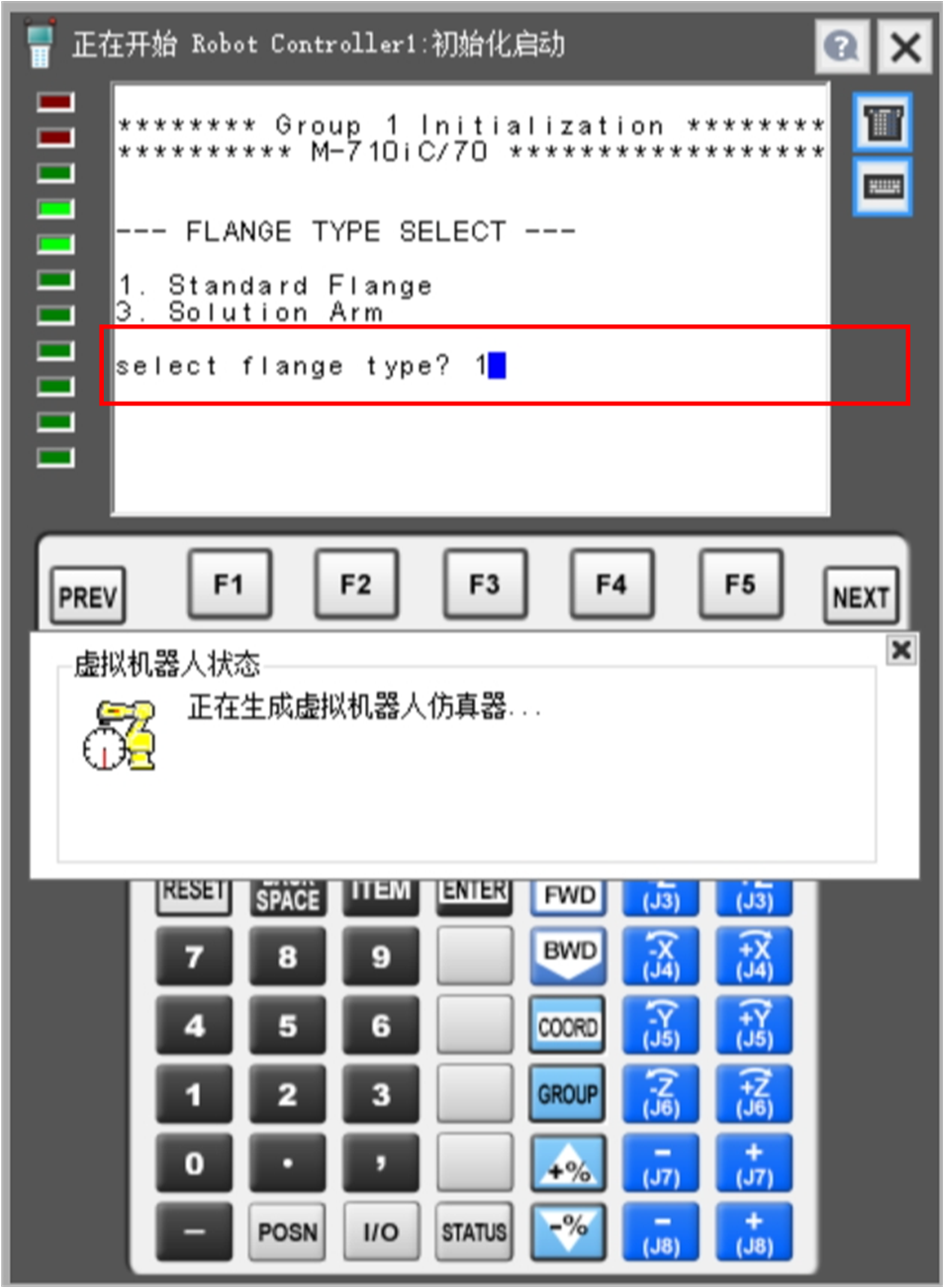
输入选项1,然后点击(jī)键盘(pán)回(huí)车(chē),等(děng)待(dài)初(chū)始(shǐ)化(huà);
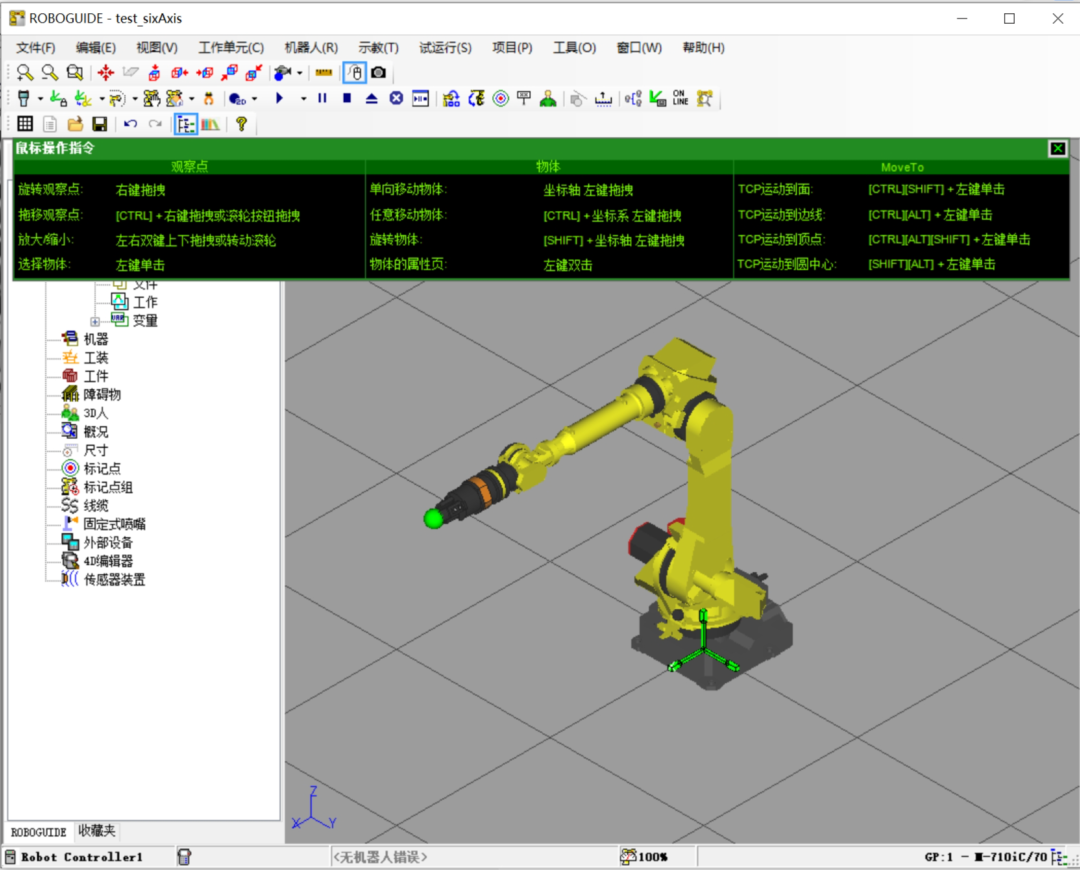
完(wán)成(chéng)创(chuàng)建(jiàn)
相关新闻







联系我们
地址:山东省济南市槐荫区兴福街道齐鲁大道3189号西进时代中心
电话:15898523365
传真:15898523365
邮箱:service@Kaiyun.cco
网址:http://www.rjptj.com

