






07
2025
-
07
力特奥维斯Littelfuse方案--人形机器人过压过流保护方案
浏览:364
发布:2025-07-07 12:00:55
【导语】本文聚焦于人形机器人的过压与过流保护方案。在探讨人形机器人的基本框架与核心零部件后,文章深入分析了电机、丝杆、控制器及传感器等关键部件的保护需求。通过类比扫地机器人,揭示了人形机器人在信号采集、处理及电机控制方面的共通性,并强调了过压过流保护的重要性。此外,文章还探讨了人形机器人的电池选择与充电技术,以及电子变换中的保护器件应用。最后,针对电池管理与保护、通信端口的静电防护等特定方面,提出了实用的解决方案。虽然人形机器人是新兴应用,但其底层硬件保护技术仍基于传统电机控制原理,本文旨在为相关领域的工程师提供有价值的参考。
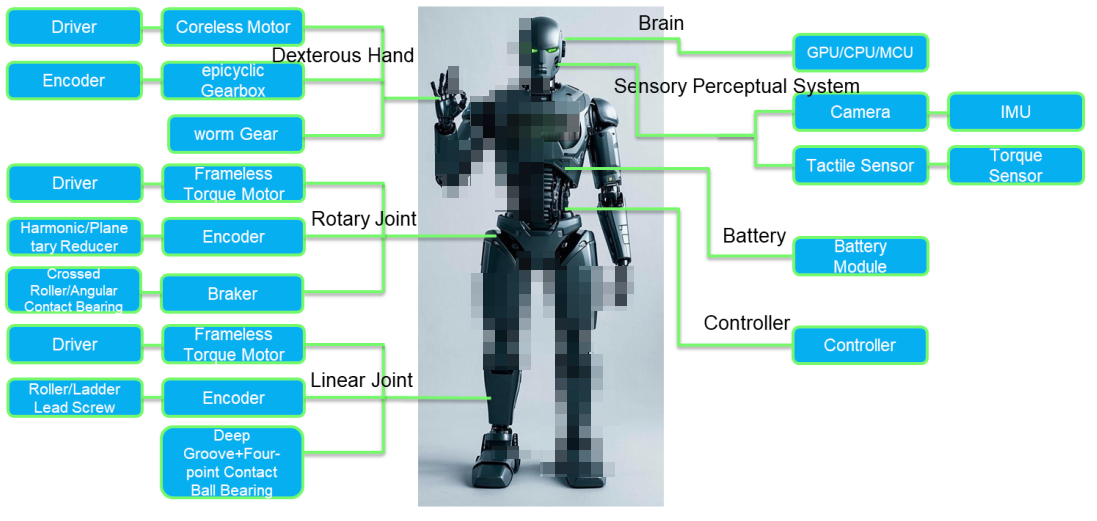
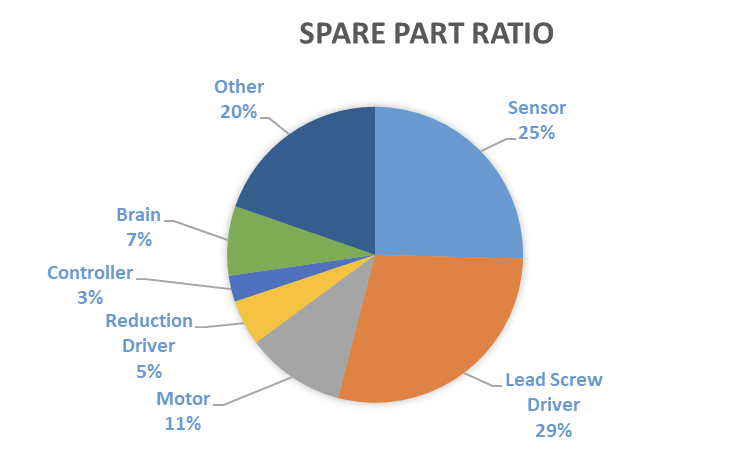
前面一章分享了人形机器人的基本框架以及每个结构对应的国内外厂家。从功能角度出发,人形机器人主要通过采集周边信号,通过大脑处理该信号,以及针对信号做出的相应执行动作。从零部件硬件成本角度出发,占大头的为丝杆,传感器,电机以及主芯片,其中丝杠作为机械结构无需电子保护,部分电机会在内部串联热敏电阻作为过温或过流保护。因此整个环节当中真正涉及过流过压保护的主要在控制器,驱动器以及传感器信号采集等,相对而言在人形机器人中占比较低,但又不可忽视。
相对而言,人形机器人可以说是电机与丝杆的协同合作为主,往小了类比,扫地机器人是一个非常典型的类同产品,同样涉及到信号采集与处理以及电机控制,只不过人形机器人执行机构更多更复杂,同时后续往人工智能方向发展为主。因此过压过流保护电路可以参考扫地机器人的架构,也是围绕着电机控制,电池供电,以及信号采集板与主控板。

人(rén)形(xíng)机(jī)器(qì)人(rén)极(jí)少(shǎo)会(huì)带(dài)线(xiàn)工(gōng)作(zuò),因(yīn)此(cǐ)内(nèi)部(bù)需(xū)要(yào)用(yòng)到(dào)电(diàn)池(chí),这(zhè)里(lǐ)就(jiù)需(xū)要(yào)涉(shè)及(jí)到(dào)机(jī)器(qì)人(rén)的(de)充(chōng)电(diàn),所(suǒ)谓(wèi)的(de)充(chōng)电(diàn)邬(wū),以(yǐ)特(tè)斯(sī)拉(lā)人(rén)形(xíng)机(jī)器(qì)人(rén)为(wèi)例(lì),电(diàn)池(chí)容(róng)量(liàng)是(shì)2kwh,因(yīn)此(cǐ)折(zhé)算(suàn)过(guò)来(lái)充(chōng)电(diàn)功(gōng)率(lǜ)大(dà)概(gài)率(lǜ)在(zài)5kw以(yǐ)内(nèi),主流(liú)的(de)在(zài)1kw甚(shén)至(zhì)500w以(yǐ)下(xià),但(dàn)未(wèi)来(lái)随(suí)着(zhe)电(diàn)池(chí)技(jì)术(shù)进(jìn)步(bù)以(yǐ)及(jí)不(bù)同(tóng)功(gōng)能(néng)或(huò)续(xù)航(háng)要(yào)求(qiú)的(de)提(tí)升(shēng),相(xiāng)信(xìn)充(chōng)电(diàn)邬(wū)的(de)功(gōng)率(lǜ)要(yào)求(qiú)会(huì)随(suí)之(zhī)提(tí)升(shēng),同(tóng)时(shí)大(dà)功(gōng)率(lǜ)充(chōng)电(diàn)器(qì)已(yǐ)经(jīng)是(shì)很(hěn)成(chéng)熟(shú)的(de)产(chǎn)品(pǐn)了(le),汽(qì)车(chē)充(chōng)电(diàn)属(shǔ)于(yú)非(fēi)常(cháng)典(diǎn)型(xíng)例(lì)子(zi),两(liǎng)轮(lún)车(chē)充(chōng)电(diàn)与(yǔ)机(jī)器(qì)人(rén)类(lèi)似(shì),属(shǔ)于(yú)低(dī)压(yā)电(diàn)池(chí)。
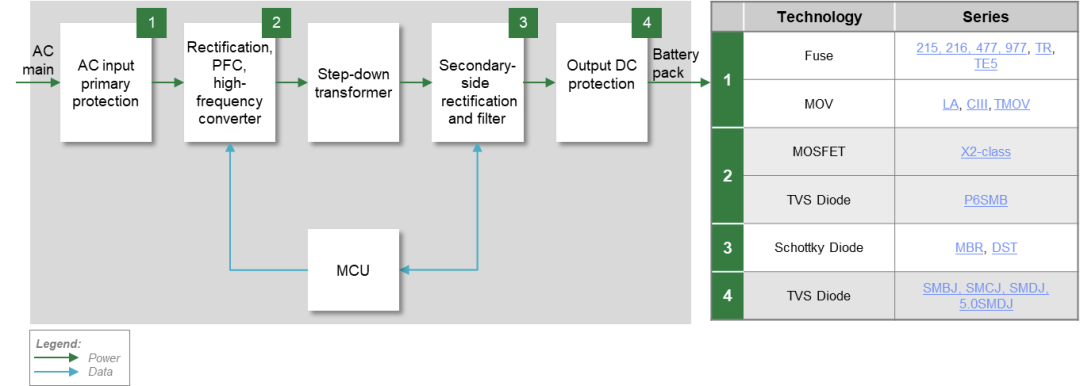
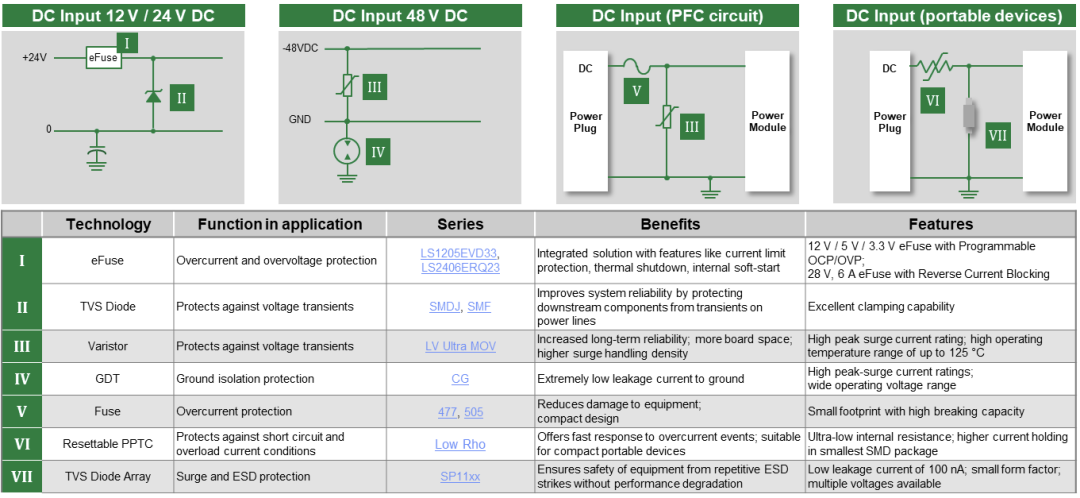
电(diàn)子(zi)变(biàn)换(huàn)除(chú)了(le)充(chōng)电(diàn)还(hái)有(yǒu)电(diàn)机(jī)控(kòng)制(zhì)以(yǐ)及(jí)电(diàn)源(yuán)电(diàn)压(yā)变(biàn)换(huàn),都(dōu)属(shǔ)于(yú)直(zhí)流(liú)供(gōng)电(diàn),因(yīn)此(cǐ)总(zǒng)结(jié)需(xū)要用到的保护器件可以参考如下,有(yǒu)eFuse作(zuò)为(wèi)高(gāo)精(jīng)度(dù)过(guò)压(yā)过流保护,TVS/MOV/GDT作为浪涌保护,Diode Array作为信号与静电保护,保险丝作为过流与短路保护。
人形机器人的电池电压通常在48-58V之间。目前,人形机器人普遍采用48-58V的系统电压,电池组结构以13-16串3-9并为主,电池类型主要是锂离子电池。
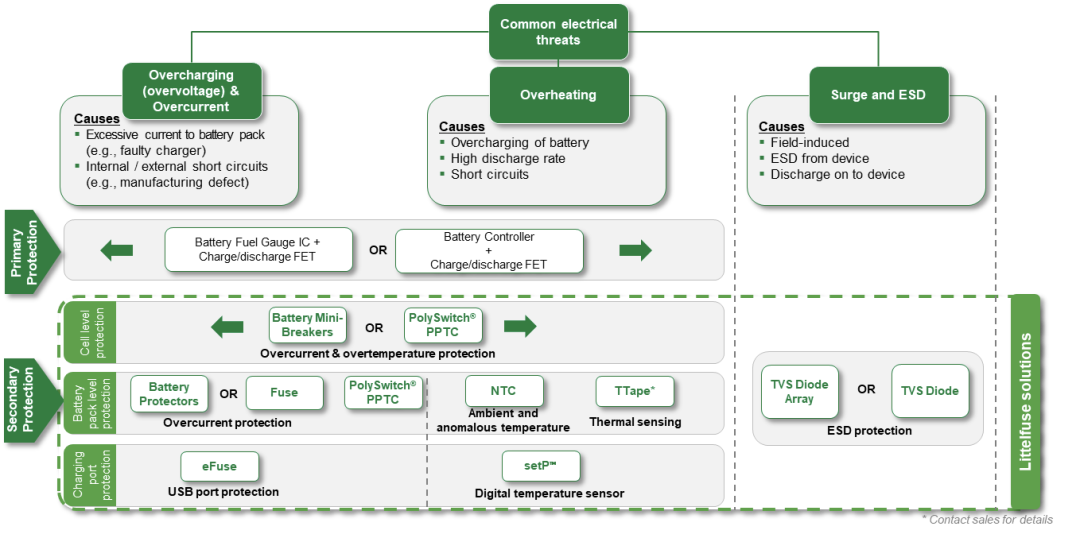
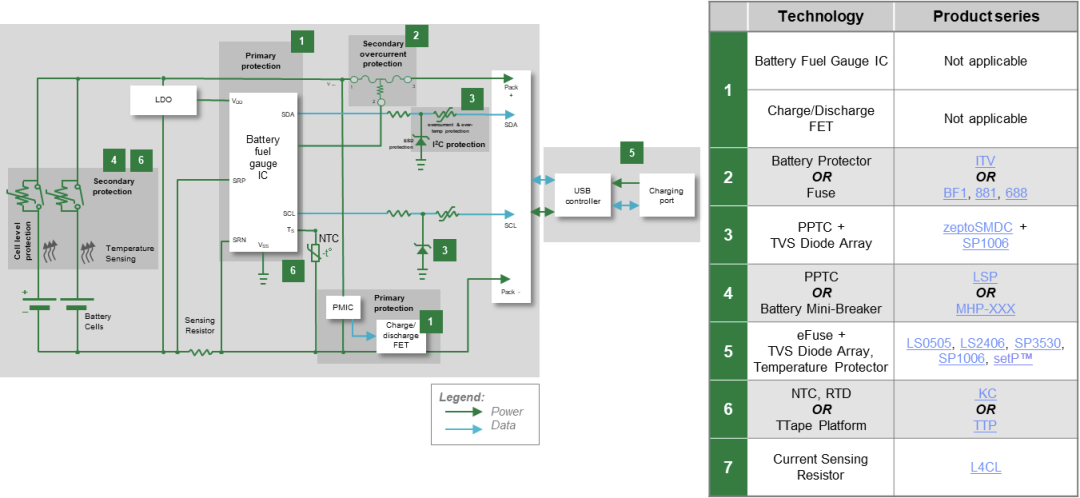
关于电池保护力特有完整的解决方案,从消费到工业再到汽车,主要涉及过流,过压以及过温保护。电芯的电池管理与保护这里不做列写,通常也是电源端口的过流保护,通信线上的过压浪涌与静电保护。
电池外围保护相对要多一些,比如电池包通常用MOSFET作为电源开关,此MOSFET两端可以并联TVS来作为电路的关断电压尖峰抑制。对于输出功率不大的地方可以采用三(sān)端(duān)保(bǎo)险丝,电流较大的也可采用大电流一次性保险丝,贴片最大可以做到200A,锁螺栓就可以做到500A,同时小的供电或者信号回路也可以采用Efuse作为电路开关或者过压过流保护,具有更高精度控制。
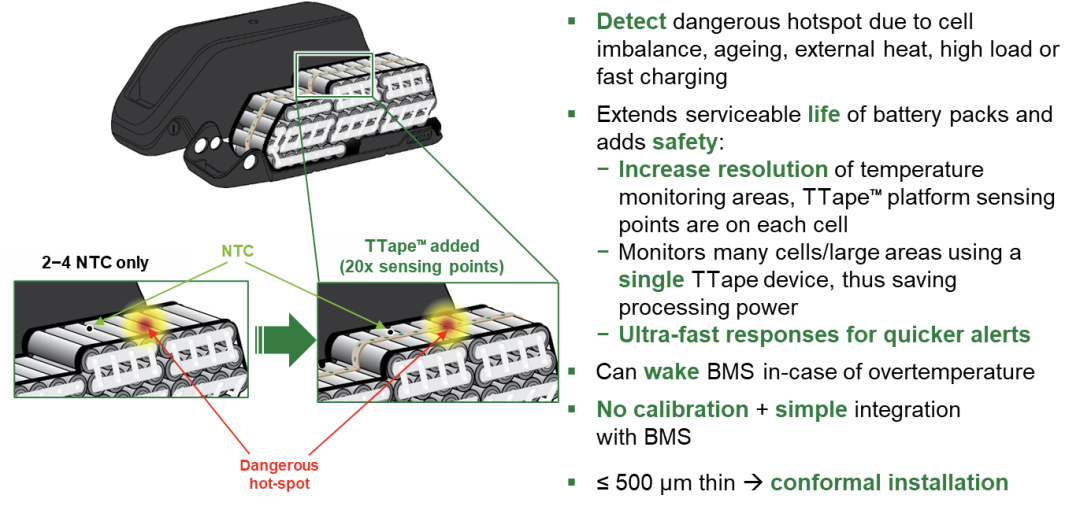
力(lì)特(tè)在(zài)过(guò)温(wēn)保(bǎo)护(hù)方面有全新的产品TTape,类似柔性板,可以针对各个(gè)需(xū)要(yào)的(de)温(wēn)度(dù)监(jiān)测(cè)点(diǎn)进(jìn)行(xíng)定(dìng)制(zhì),同(tóng)时整个链路采用串联模式,优点可以实现极少I/O口占用,同时响应速度快,但缺点是没办法实现具体故障点的报警,如果需要各个温度点的温度实时监测,还是得用到NTC。
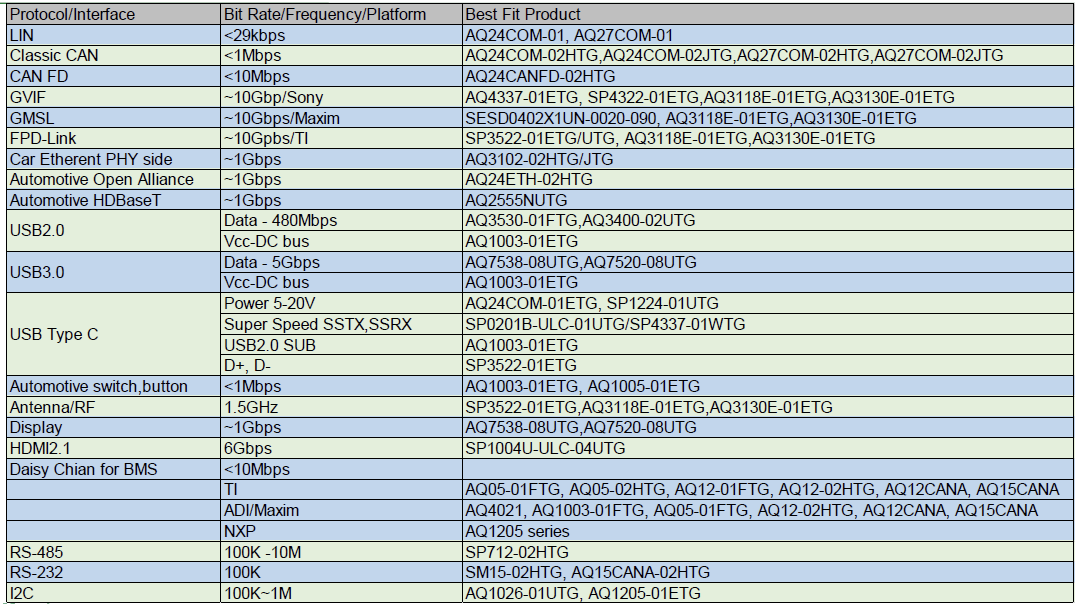
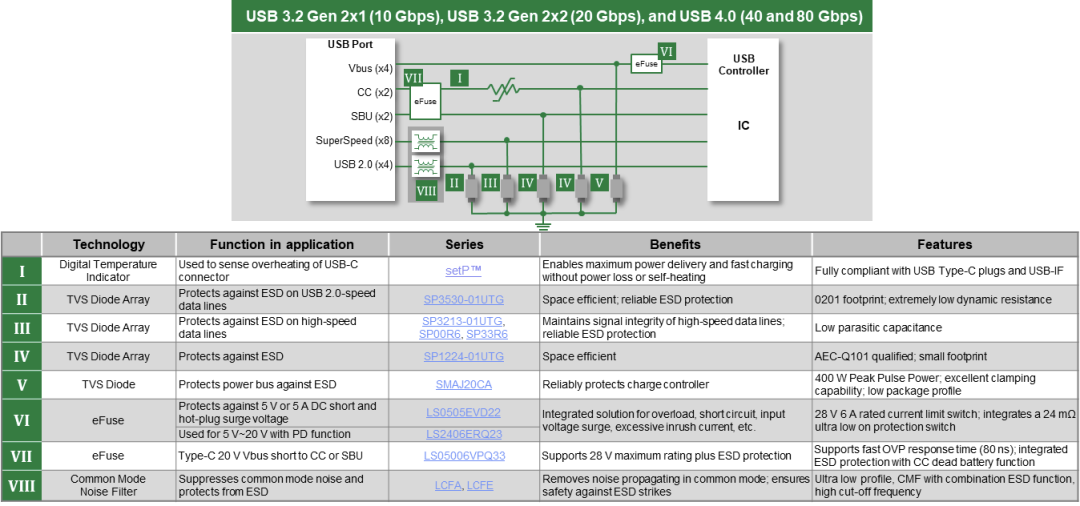
通信端口则有很多ESD产品推荐,如下罗列了比较常用的信号接口类型以及对应的静电产品推荐。
本篇文章比较简单,主要分享比较常用的几个功能模块过压与过流保护方案,这些方案在现有消费类以及工业类应用都有迹可循,人形机器人是比较热门比较新的应用,但底层硬件还是比较传统的电机控制为主。
相关新闻







联系我们
地址:山东省济南市槐荫区兴福街道齐鲁大道3189号西进时代中心
电话:15898523365
传真:15898523365
邮箱:service@Kaiyun.cco
网址:http://www.rjptj.com

